
At a glance
- Sliding surface detected at ~10 m depth
- Validated against borehole and DPSH data within less than 2 m
- Signal penetration ~12 m, imaging to ~15 m
- LiDAR DTM at 1.49 cm/px, ~2400 points/m², ±2-3 cm RMSE vertical accuracy
- Two missions, one UgCS project: GPR at 1 m AGL and LiDAR at 50 m AGL
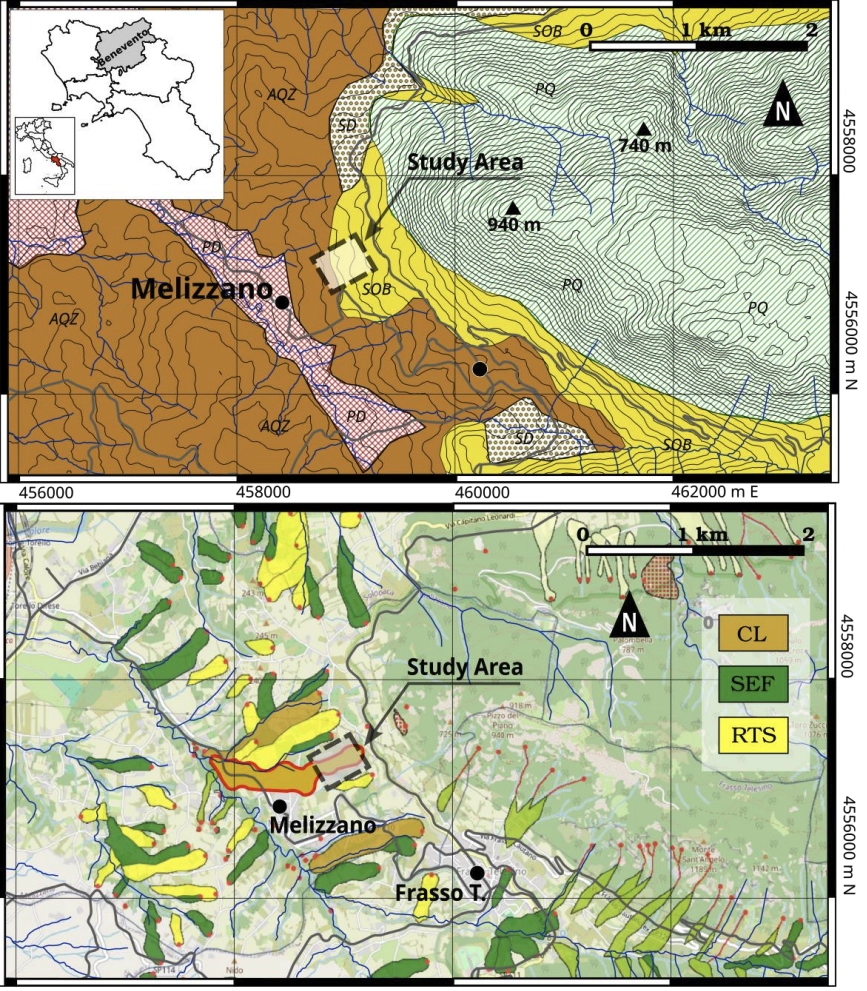
- Site: ~261,407 m² IFFI-classified dormant landslide, Southern Italy, grass 60-70 cm, slopes to 57°
- Software: UgCS Enterprise v5.16.1, UgCS Custom Payload Manager, SkyHub, True Terrain Following
The slope sits above Melizzano, in Campania. Over 261,000 square meters of it carries a dormant label in Italy's national landslide inventory (IFFI). The road at the base kept cracking. Locals were not convinced.
Researchers at INGV (Istituto Nazionale di Geofisica e Vulcanologia) and the University of Sannio wanted to know what was actually happening under that slope. Dense pasture grass at 60-70 cm. Angles hitting 57 degrees. Walking GPR gear across terrain like that is hazardous and produces incomplete coverage. They turned to a drone-mounted GPR system instead.
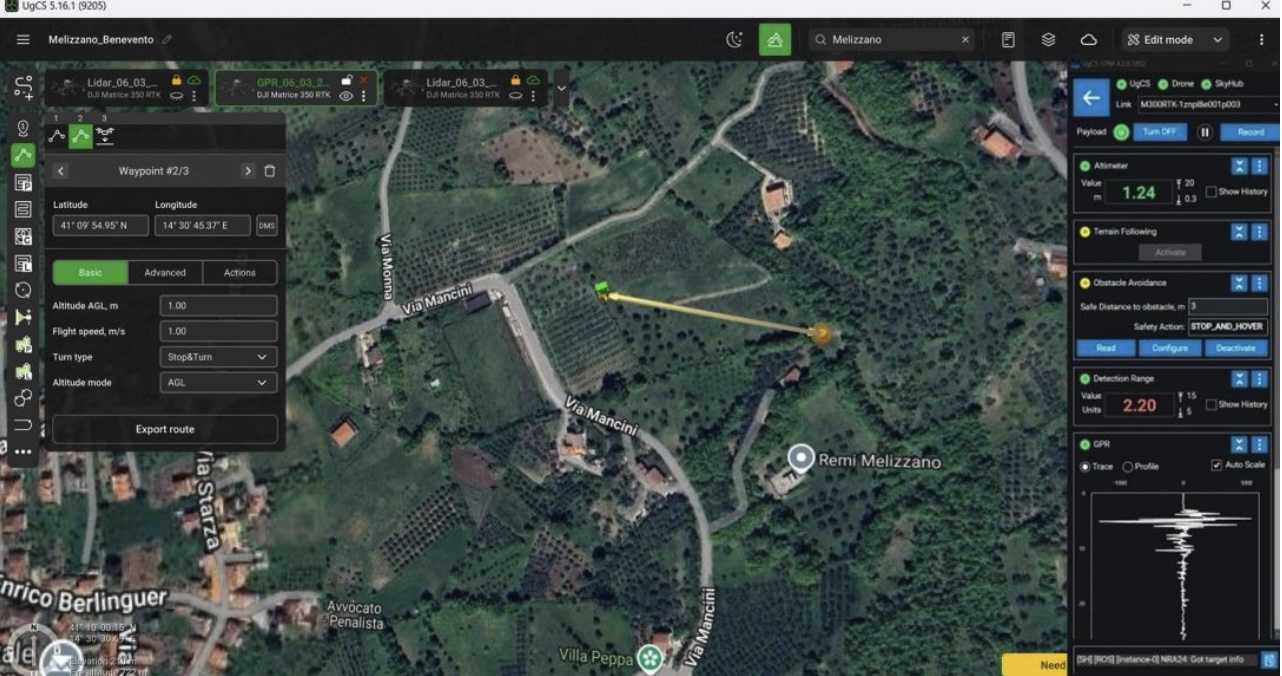
One meter above the grass
On a 57-degree vegetated slope, holding 1 m AGL is not something you can manage manually with any consistency.
The team mounted a Cobra Plug-in Sub-Echo 70 antenna (20-140 MHz) under a DJI Matrice 600 Pro and flew the east-west transect at approximately 1 meter above the grass. UgCS Enterprise with True Terrain Following read live altimeter data through SkyHub throughout the flight and adjusted altitude continuously to keep the antenna at consistent height above ground. Consistent antenna height means consistent reflection amplitude, which means the depth figures in the radargram can be trusted.
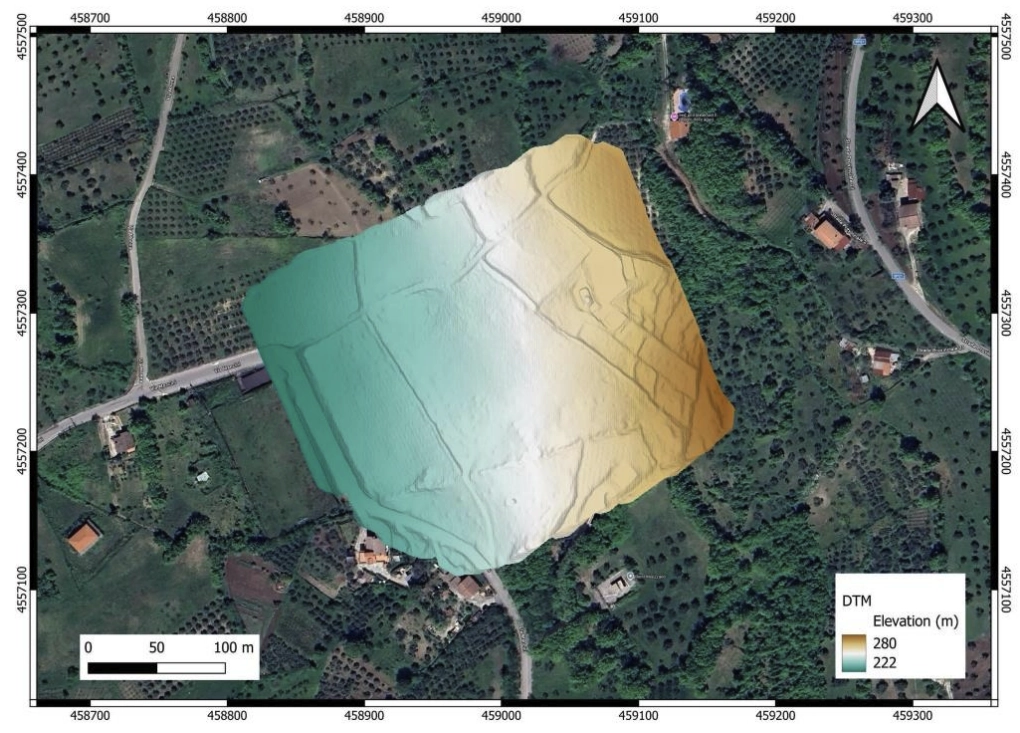
For the LiDAR mission, the team used a DJI Matrice 350 RTK with a Zenmuse L2, planned in the same UgCS Enterprise project at 50 meters AGL, parallel flight lines, ~75% overlap. The Zenmuse L2 records up to five returns per laser pulse, which is what allows the algorithm to separate 60-70 cm grass from the actual ground surface and produce a usable bare-earth digital terrain model (DTM).
Both missions, planned in the same project, the same coordinate system, the same software.
The survey stack: UgCS, SkyHub, and True Terrain Following
UgCS Enterprise v5.16.1 planned both missions. Different altitudes, different flight profiles, different payloads. One environment.
UgCS Custom Payload Manager (referenced in the paper as the Custom Payload module) synchronized the Cobra antenna acquisition with UAV positioning, so every radar trace was georeferenced along the track as it was collected. That synchronization tied each radar trace to a GPS solution. Depth correlation against physical borehole locations on the ground came directly from it.
SkyHub sits between the flight controller and the GPR antenna. It handles payload integration, geotagged data logging, real-time telemetry, and feeds the altimeter readings that True Terrain Following runs on.
True Terrain Following read the radar altimeter continuously and adjusted altitude throughout the transect. The slope changed. The grass height varied. The antenna stayed at 1 meter, relative to the surface. A fixed-altitude approach would have left it drifting between 0.5 and 2 meters and produced a radargram unsuitable for depth interpretation.
What the radargram revealed: a 10 m sliding surface
A laterally continuous high-amplitude reflector runs across the entire east-west transect at approximately 10 meters depth. Below it the signal turns homogeneous and quiet, the signature of stable geological substrate. Above it, chaotic reflections mark displaced material deforming under gravity.
Three borehole and Dynamic Probing Super Heavy (DPSH) test sites confirmed the depth within less than 2 meters. The LiDAR DTM, at 1.49 cm/px resolution with centimetric absolute accuracy, revealed minor scarps and slope breaks that the vegetation hid from field observation. The GPR showed shallow branches of the sliding surface reaching those exact scarps. The surface is concave-upward in the upper sector, transitioning to sub-planar downslope: a compound roto-translational mechanism. The IFFI dormant classification does not fit the central sector.
Why UAV GPR works where ground surveys cannot
For geotechnical and infrastructure monitoring teams
Slope stability assessment around tailings dams, transport corridors, and pipeline rights-of-way runs into this problem at scale: terrain that is both hazardous to access and vegetated well enough to defeat ground-based survey equipment. This workflow produces validated subsurface imaging to 10-15 m depth, with surface-to-subsurface correlation through LiDAR, without a ground crew on the slope.
For government research and hazard assessment bodies
National inventories are only as accurate as the methods that populated them. The Melizzano UAV GPR survey took two flight days and produced borehole-validated depth data sufficient to update an official classification. Applying that to other polygons in the same inventory is a tractable problem.
For academic geophysics groups
The paper locks the software version, flight parameters, and processing chain in the methods section. UgCS Enterprise v5.16.1 with Custom Payload Manager, SkyHub, and True Terrain Following is a documented, reproducible pipeline for low-altitude UAV-GPR geotechnical surveys in vegetated terrain. This is the first peer-reviewed validation of the approach at depths beyond 10 meters.
What's next
The paper flags two extensions: multiple parallel GPR transects for full three-dimensional reconstruction of the landslide body, and repeat surveys to track seasonal movement and monitor reactivation over time.
Equipment and software
- UgCS Enterprise v5.16.1
- UgCS Custom Payload Manager
- SkyHub onboard computer
- True Terrain Following
- DJI Matrice 600 Pro with Cobra Plug-in Sub-Echo 70, 20-140 MHz (third-party GPR antenna)
- DJI Matrice 350 RTK with DJI Zenmuse L2
- RTK GNSS / NTRIP via INGV RING network, PSB1 station, Pesco Sannita
Reference: Famiglietti, N.A., Massa, B., Memmolo, G., Testa, G., Memmolo, A., Vicari, A. (2026). Integrated UAV-Borne GPR and LiDAR for Investigating Slope Deformation Processes: The Melizzano Case Study (Southern Italy). Drones 10, 331. MDPI.