

Project snapshot
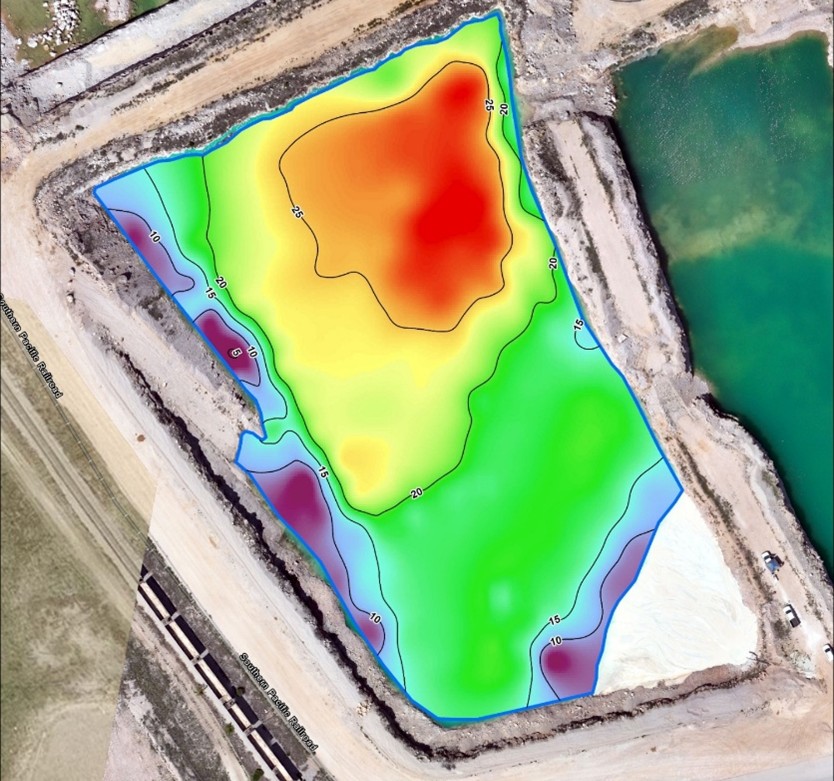
- Outcome: Thirty feet (30 ft) maximum pond depth detected; consolidated sediment identified under high turbidity
- Industry: Mining & Aggregates
- Application: Bathymetry with UAV + LiDAR
- Location & Date: Texas, USA, May 2025
- Hardware: DJI Matrice 350 RTK UAV, DJI Zenmuse L2 LiDAR, SPH Engineering Bathymetry Kit
- Software: UgCS flight planning software, SkyHub onboard computer firmware
- Scale: Two-phase workflow; one LiDAR flight (10 min), one bathymetry mission
- Outcome: Drone-based bathymetry for Knife River in Texas (May 2025) achieved 30 ft maximum depth detection and mapped sediment layers in turbid water without boat access.
Client and objectives
Knife River, a leading U.S. aggregates and construction materials producer, needed accurate pond depth and sediment mapping to maintain operational efficiency at a Texas limestone quarry. To support them, Westward Geology Group was contracted to deliver a UAV-based survey solution. Their objective was to measure water depth and sediment structure safely, without deploying boats.

Environment and constraints
The quarry pond was actively receiving discharge, creating turbidity and suspended fines. Steep banks prevented boat access, while submerged obstacles and active pumping increased safety risks. Vegetation around pond margins further limited ground access. The survey required non-contact data capture that could operate effectively despite interference in the water column.
Solution architecture
To meet these objectives, Westward Geology Group deployed a two-phase UAV workflow.
- UAV platform: DJI Matrice 350 RTK with RTK positioning for accuracy
- Payload 1 (Phase 1): DJI Zenmuse L2 LiDAR (≈400 pts/m² density, 10 min flight)
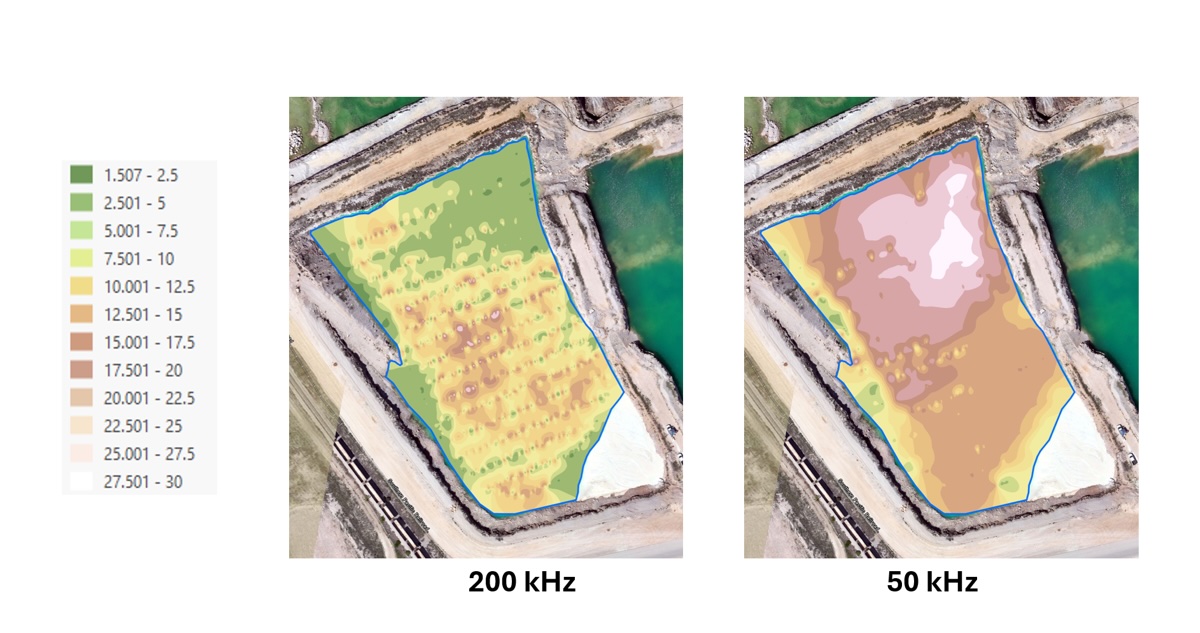
- Payload 2 (Phase 2): SPH Engineering’s drone-based Bathymetry kit (200 kHz & 50 kHz)
- Onboard computer: SkyHub firmware for payload control and data logging
- Mission planning software: UgCS with automated grid flight path
- Workflow: LiDAR for elevation and pond geometry → UAV bathymetry for depth and sediment mapping
- Rationale: UAV workflow chosen over boats for safety, speed (<1 h survey time), and access to steep/vegetated pond margins

Implementation
1. Plan
Mission planned in UgCS: grid layout, six-inch (15 cm) tow depth, RTK accuracy, line spacing optimized for pond size.
2. Prepare
SkyHub configured, sonar calibrated, UAV safety checklist completed. Steep banks marked as no-go areas.
3. Execute
One LiDAR flight (~10 min) captured elevation data; one bathymetry mission mapped the pond interior. UAV maintained terrain following; operators stayed on shore.
4. Process
LiDAR point cloud processed to DEM; sonar logs (200 kHz and 50 kHz) processed to depth grid. QA confirmed alignment between datasets. Deliverables: bathymetric map, sediment interpretation.
Results
The workflow delivered high-resolution elevation and depth datasets.
Key KPIs:
- Maximum depth: Thirty feet (30 ft)
- Sediment detection: Consolidated bottom identified at 50 kHz despite turbidity blocking 200 kHz (100% detection vs 0% at high frequency)
- Survey time: One LiDAR flight (10 min) + one bathymetry mission (20 min). <1 h total (vs multi-hour boat survey)
- Safety: Zero water entry (vs high-risk boat deployment)
Validation and methodology
Line spacing matched pond size, with overlap to ensure complete coverage. RTK GNSS ensured positional accuracy. Dual-frequency sonar outputs cross-checked for consistency; 200 kHz reflected suspended fines, 50 kHz penetrated to the consolidated bottom. Data processed in UgCS and validated against expected sediment layering patterns.
No boats or personnel entered the water, thereby eliminating the risk of drowning.
Conclusion
The Knife River pond survey demonstrates how a UAV-based bathymetry solution can overcome the typical limitations of sediment mapping in active, sediment-laden industrial environments. The integration of a drone-compatible sonar system allowed Westward to detect both visible pond depth and subsurface sediment structure, even under challenging turbidity conditions. This method enabled safe, fast, and high-precision data collection without requiring water entry or boat access.
Read the full case study: UAV-Based Echo Sounder Survey at a Texas Quarry.
