

Content
UgCS provides low latency, reliable video live stream from drones in the field to any location (HQ/office/operations center) via WiFi/LTE. UgCS Video subsystem is created according to MISB standard for video metadata, which supports GPS coordinates, altitude, camera attitude information as well as video recording.
Drone-based video surveillance may serve several purposes:
- provide high-quality video feed for the in-field video observer
- stream video from the field to the video monitoring room
It is very common for a drone pilot to be focused on piloting and thus unable to monitor video feed. In such cases, a separate video observer can perform the monitoring. One advantage of such a setup is that the video observer can stay in a car or a tent protected from the weather and still perform very accurate video analysis while the drone is in the air.
Setting up in-field video observer can be especially helpful for:
- industrial inspection of vertical walls, dams, powerlines, bridges
- search and rescue operations
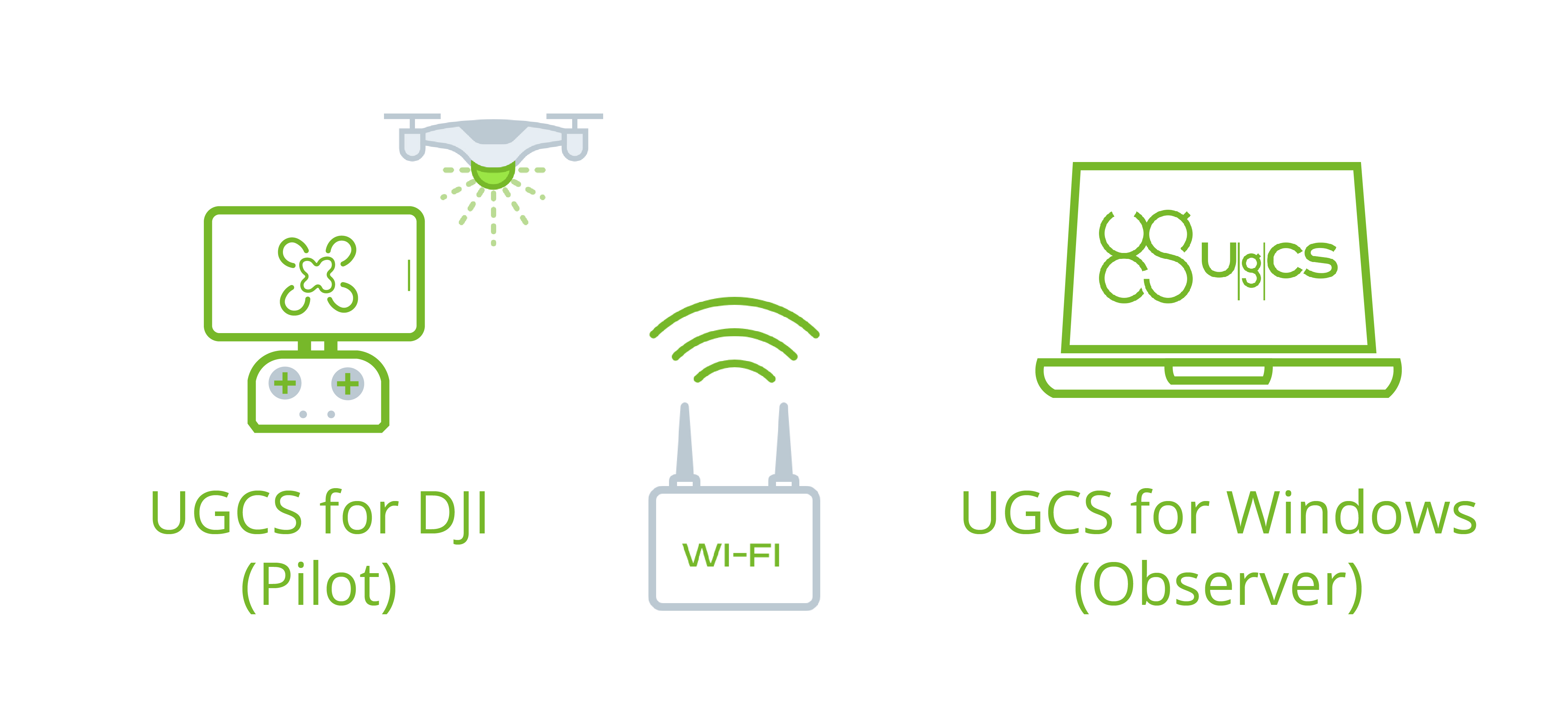
Video streaming setup with DJI drones consists of the following components (Figure 1):
- Android tablet with UgCS software for DJI
- Windows computer with UgCS ENTERPRISE with the following components:
- UgCS from the main UgCS installer
- UgCS Video Server and UgCS Video Player from UgCS Video installer
If the Android mobile device and Windows computer are in the same Wi-Fi network, then these components will connect automatically. In some cases, manual configuration may be needed.
To view the video footage, use UgCS Video Player.
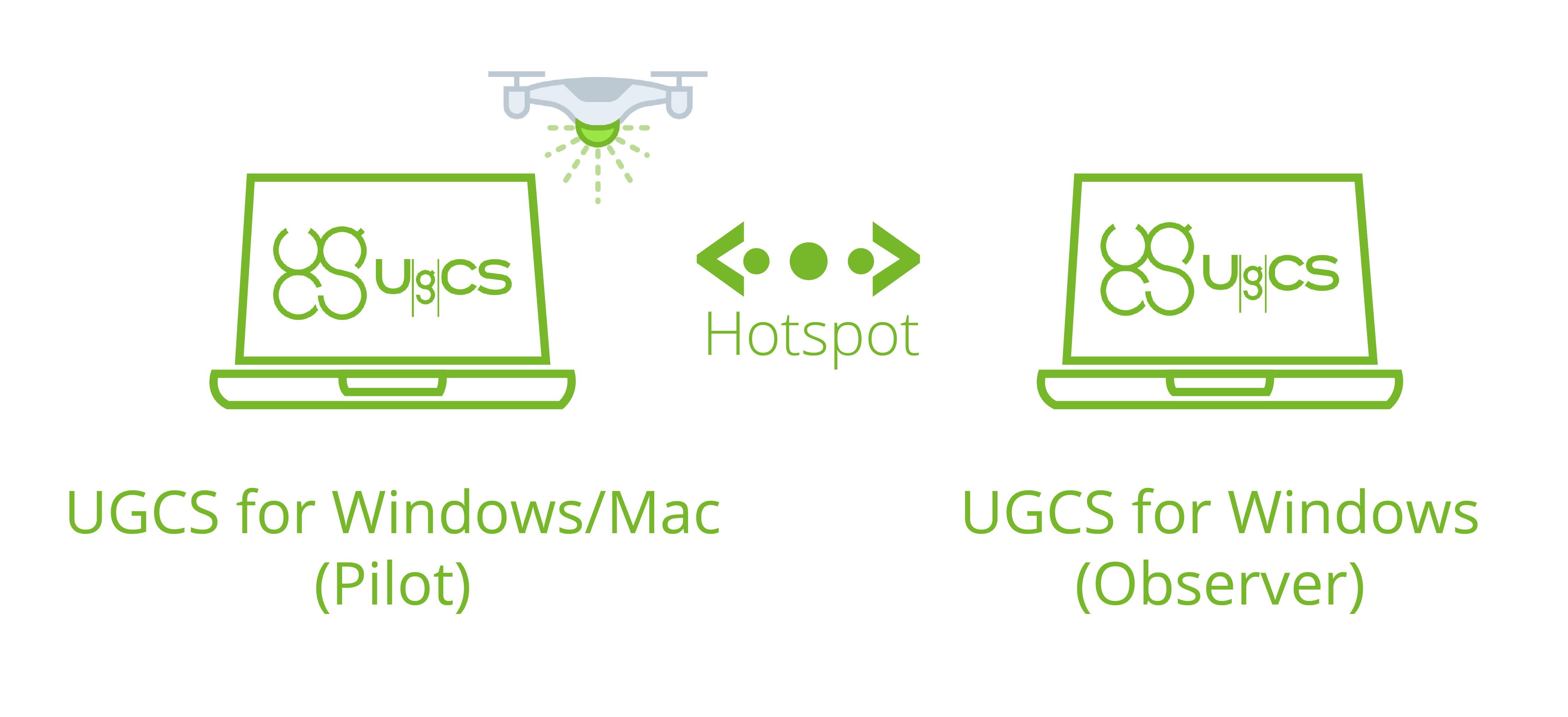
Ardupilot/PX4 drones tend to lack a standard RC video transmission link (such as DJI Lightbridge) and the video feed is usually sent over third-party video link devices which can be connected to the computer via USB and are treated as ordinary web cameras.
To receive video feed from Ardupilot / PX4 drones, we have developed a dedicated Windows app called UgCS Video Transmitter that`s included in standard UgCS installation. It can automatically detect connected video link devices as video sources and transmit the content to UgCS Video Server running either on the same computer or a different device. Moreover, UgCS Video Transmitter can also use RTSP stream as a source.
So, typically, the pilot in the field would have UgCS + UgCS Video Transmitter installed on their PC and the observer would have UgCS + Video Server and Video Player installed. If the pilot and the observer have their computers in the same Wi-Fi network, then the UgCS Transmitter application will automatically connect to the second laptop with Video Server and Video Player.
This setup would allow the observer to closely monitor the video feed coming from the drone while having the pilot focus on flight planning, execution, and control of the aircraft.
Drone-based video streaming with UgCS ENTERPRISE can be deployed in distributed configuration with pilots in the field and observers in a video monitoring room (Figure 3).
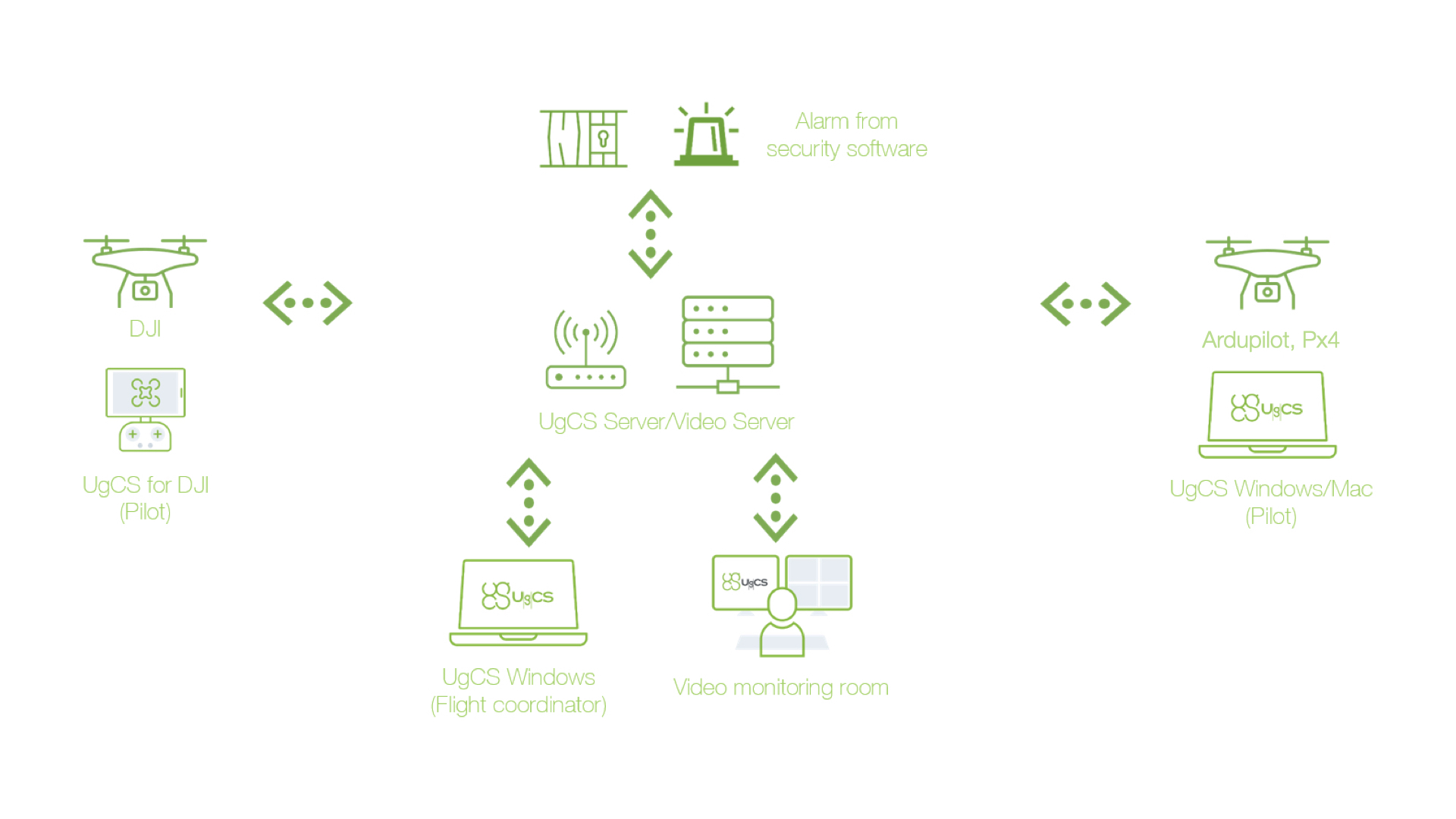
UgCS Video server must be launched in the video monitoring room on a computer with a public IP address. To stream video from the field, the pilot should connect the applications to the UgCS Video server:
- With DJI drones, the pilot configures UgCS for DJI Android application
- With Generic Ardupilot/Px4 drones with custom video link, pilot configures UgCS Video Transmitter Windows application
To view video footage, use UgCS Video Player or configure integration with VMS.
UgCS Video Server can display the RTSP link for each video feed. The RTSP link can be copied from the video viewer in UgCS Video Player and added to VMS as a generic camera.
UgCS Video Server can display the RTSP link for each video feed. The RTSP link can be copied from the video viewer in UgCS Video Player and added to VMS as a generic camera.
With other VMS systems, the approach will be similar.
All UgCS components can work within a VPN. VPN can significantly enhance the security of data transmitted from the field to the office.
The system is built based on the MISB standard. This standard defines the media streaming format, which supports metadata streaming among video and audio streams. The transport stream is based on the MPEG-TS standard, while the video stream is encoded by H.264 codec, and the Metadata stream is encoded by the KLV codec (Figure 4).
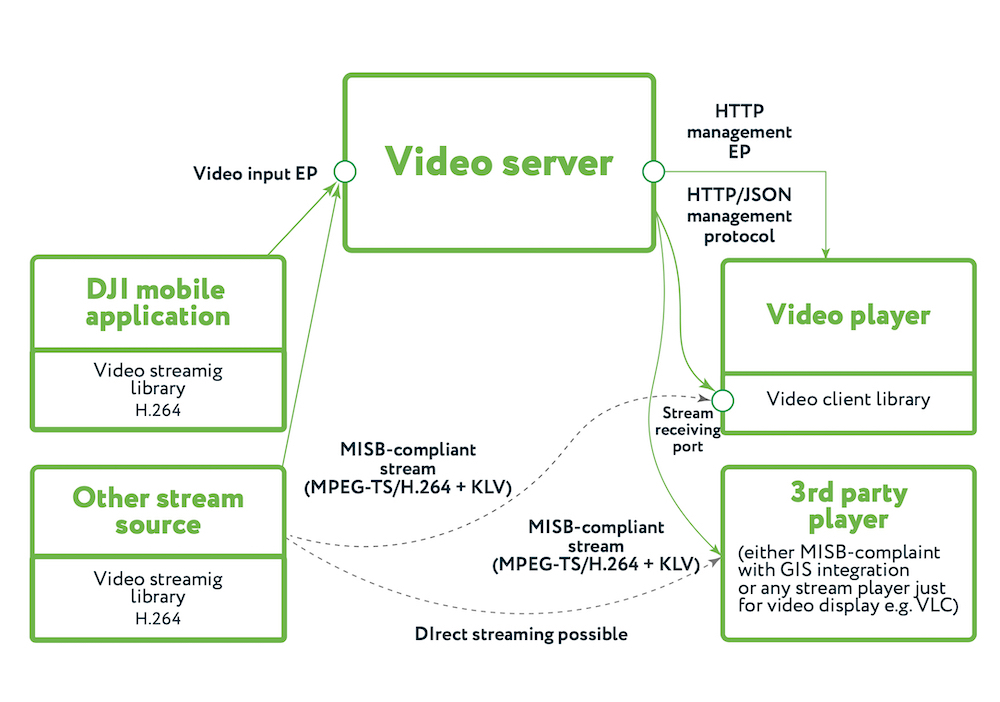
The video server is used for multiplexing streams between several clients, video recording, etc. Stream format input and output are identical, although streaming protocol may differ (see below). Therefore, this can be an optional component to play the stream directly from the source. However, the audience will be limited to one client in such a case (if not using UDP multicast).
The stream can be played with most modern media players (like VLC), but the KLV stream with metadata will not be shown with such players. The video can also be played with any MISB-compliant player, which is usually integrated into some GIS so that the video is instantly connected with a location on a map.
The video server supports MPEG-TS with UDP-based transport.
A subset of "ST 0601.17 UAS Datalink Local Set" metadata is supported.