

Both configurations successfully mapped the buried targets. However, the systems behaved differently in terms of electromagnetic interference, stability, gradient computation, and operational efficiency.
Quick Facts
- Organization: Institute for Electromagnetic Sensing of the Environment, National Research Council of Italy (CNR IREA)
- Location: Altopiano di Verteglia, Southern Italy
- UAV Platform: DJI M300 RTK
- Systems Compared: UAV-borne magnetometer systems MagNIMBUS and MagArrow sensors integrated with SkyHub onboard computer and UgCS flight planning software
- Survey Area: 120 m × 34 m
- Flight Speed: 2 m/s
- Key Result: Both systems detected buried pipelines. MagNIMBUS delivered higher-resolution vertical gradients in a single flight, while MagArrow provided cleaner raw magnetic signals but required two flights for gradient calculation.
Background: Effects of Sensor Configuration on Magnetic Data Quality
This study compares two UAV-borne magnetic survey systems for aerial geophysical surveying mounted on the same DJI M300 RTK platform: SPH Engineering’s MagNIMBUS and Geometrics MagArrow integrated systems. Although both systems measure the total magnetic field using scalar atomic magnetometer sensors, they differ fundamentally in how the sensors interact with the drone platform.
MagNIMBUS uses a rigid dual-sensor configuration that enables simultaneous vertical gradient acquisition. MagArrow employs a suspended configuration that reduces electromagnetic interference but requires two separate flights for gradient calculation. This case study focuses on how these UAV sensor-platform configurations influence noise levels, vertical gradient quality, flight stability, and operational efficiency.
Study Objective: Evaluating UAV Magnetometer Performance and Survey Accuracy
The aim of this study was to understand how mounting configuration affects:
- Electromagnetic interference from the UAV
- Stability during flight
- Vertical gradient reliability
- Spectral noise distribution
- Operational time and efficiency
To ensure a meaningful comparison, both systems were flown over the same 120 m × 34 m test area with 18 parallel survey lines spaced approximately 2 m apart. They maintained a constant speed of 2 m/s.
UAV Magnetometer System Configurations Compared
The MagNIMBUS integrated system includes two QuSpin QTFM Gen-2 scalar sensors in gradiometer configuration, mounted rigidly above and below the UAV with approximately 1.7 m of vertical separation. The system samples at 200 Hz and uses a radar altimeter for UAV terrain following. The configuration integrates the SkyHub onboard computer, which manages data acquisition and powers the payload and UgCS flight planning software. The vertical gradient was calculated from a single flight because both sensors record simultaneously.
The MagArrow system uses a Micro-Fabricated Atomic Magnetometer (MFAM) sensor suspended 3 m below the UAV. It samples at 1000 Hz and relies on a Digital Terrain Model for altitude control. Vertical gradient was derived from two separate flights at different heights.
The key distinction lies in sensor positioning: MagNIMBUS prioritizes structural rigidity and simultaneous acquisition, while MagArrow prioritizes distance from the UAV to reduce interference.

Magnetic Data Quality Assessment: Noise Characteristics and Spectral Behavior
Unfiltered total field profiles acquired along the same survey line were first compared. Both UAV magnetometer configurations recorded the same buried pipeline anomalies. However, noise levels differed.
In the MagNIMBUS configuration, the sensor positioned 0.5 m from the UAV recorded oscillations up to ~10 nT, while the lower sensor (1 m distance) showed noise up to ~5 nT. In the MagArrow configuration, suspended 3 m below the UAV, noise remained below 1 nT.
The frequency content of both datasets was analyzed. The MagNIMBUS data showed a clear 50 Hz peak associated with UAV-generated electromagnetic interference. The MagArrow data also contained a 50 Hz component, but the 3 m separation reduced UAV interference significantly. Instead, the suspended configuration exhibited low-frequency peaks around 1.5 Hz and 0.38 Hz caused by payload oscillation.
In both systems, the target signal concentrated around 0.05-0.06 Hz. A 0.1 Hz low-pass filter was applied to isolate this band and suppress higher-frequency noise.
Total Field and Vertical Gradient Results
After applying the low-pass filter, the data was interpolated on a 1 × 1 m grid to produce total field anomaly maps for both systems.
Both UAV survey systems revealed two main anomaly trends corresponding to buried steel pipelines: a stronger central NE-SW trend and a northern E-W trend. The MagNIMBUS vertical gradient provided sharper definition, while the MagArrow gradient appeared smoother due to non-simultaneous acquisition.
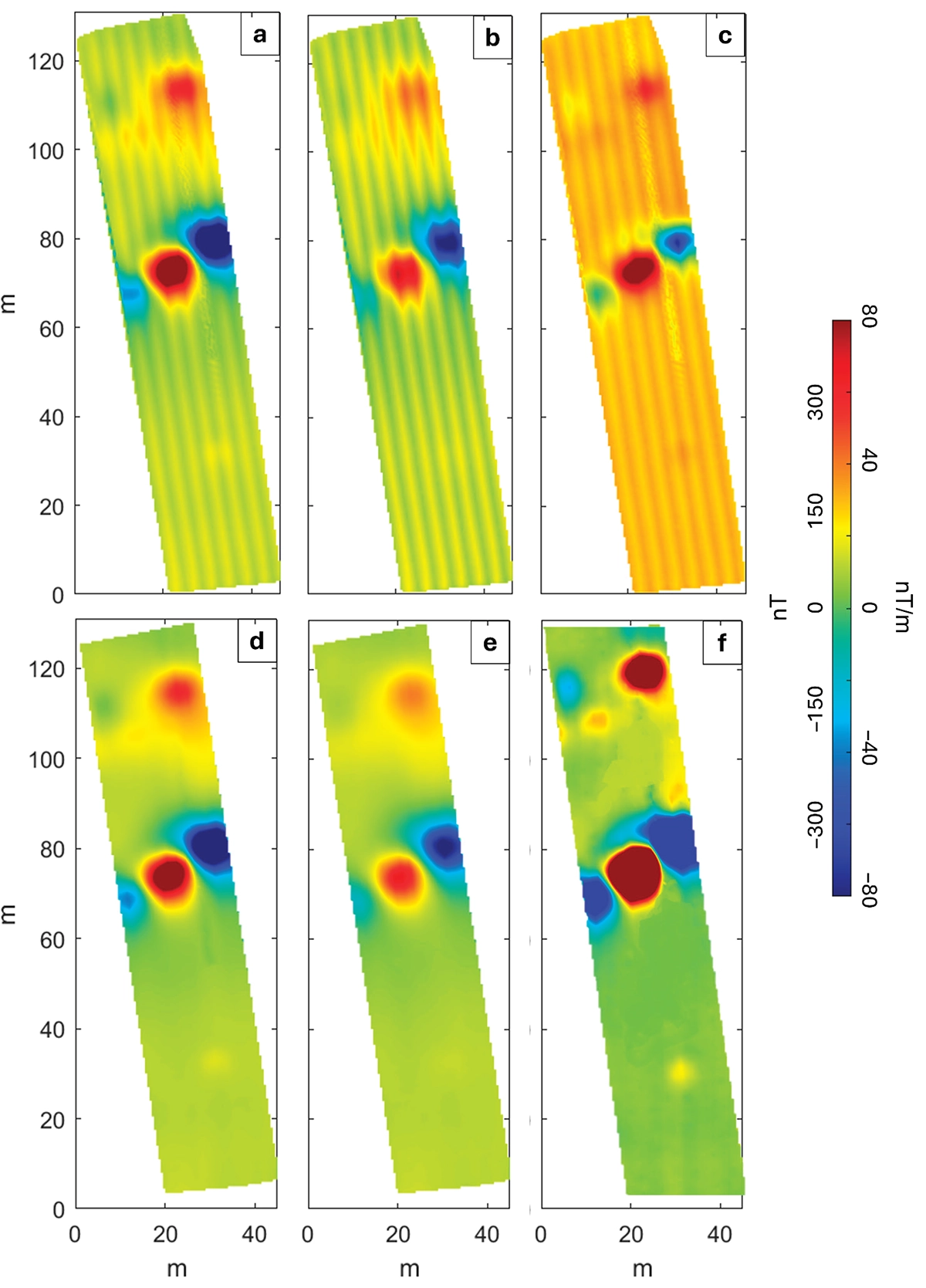
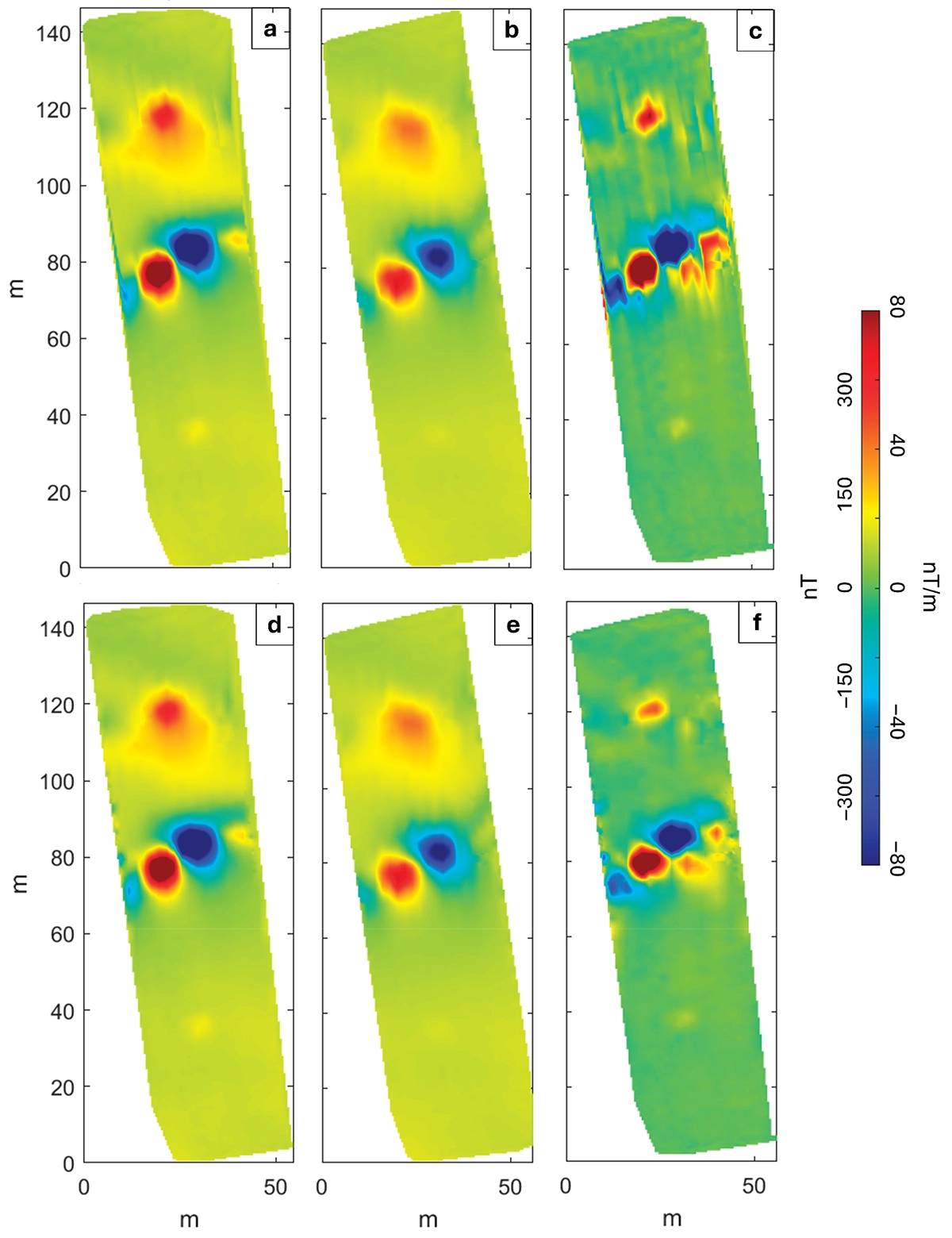
Technical Interpretation of UAV Magnetometer Results
Both UAV magnetometer systems detect the buried steel pipelines successfully. The anomalies display alternating highs and lows typical for ferromagnetic pipe sections with variable permanent magnetization.
MagNIMBUS delivers higher-resolution vertical gradient results because it measures both levels simultaneously. MagArrow reduces electromagnetic interference but loses gradient fidelity due to flight-to-flight variability.
The comparison highlights a clear trade-off:
- Rigid dual-sensor systems enable simultaneous gradient measurement but increase proximity-induced noise.
- Suspended systems reduce noise but require repeated flights and introduce alignment sensitivity.
Heading Error and Flight Direction Effects
The comparison also highlighted differences in flight behaviour and line consistency. The MagNIMBUS configuration showed a pronounced heading error because the platform rotated between adjacent survey lines during acquisition, producing systematic offsets between opposite flight directions. By contrast, the MagArrow configuration maintained a fixed yaw during flight, which prevented heading error, although its vertical gradient remained sensitive to point mismatches between the two separate flights required for gradient calculation.
Conclusion: Selecting the Right UAV Magnetometer Configuration
This comparison shows that both UAV magnetometer configurations are capable of reliably detecting strong buried magnetic targets such as steel pipelines. MagNIMBUS demonstrated a clear advantage in operational efficiency and vertical gradient definition by collecting simultaneous measurements in a single flight. MagArrow delivered cleaner raw magnetic signals through greater separation from the UAV platform, but its need for two flights reduced gradient consistency and overall resolution.
Rather than identifying a universally superior configuration, the study highlights a practical trade-off between noise reduction, gradient quality, and survey efficiency. The most suitable system depends on the specific survey goal, the level of gradient detail required, environmental conditions and operational constraints.
Read the full report: Advances in Magnetic UAV Sensing, a Comparative Study of the MagNIMBUS and MagArrow Magnetometers