

Mission Summary
Organization: Korea National University of Heritage & GEOSTRY Co. Ltd
Application: Hyperspectral drone imaging for cultural heritage conservation
Location: Gongsanseong Fortress, Gongju, South Korea
Challenge: Fixed-bracket systems and consumer flight software caused sensor shutdowns, image distortion, and GPS errors during precision imaging missions
Integrated Solution:
- Custom precision 3-axis gimbal with aligned center of gravity
- Separated power systems (external battery for sensor)
- UgCS desktop planning with fine-tuned turning control
Results:
- 61% reduction in imaging time (37 min → 14 min)
- 2.56× increase in coverage area (0.46 km² → 1.18 km²)
- 54% improvement in battery efficiency (16% → 70%)
- Zero sensor shutdowns during final testing
- Eliminated GPS data errors and image alignment problems
The Challenge: Hyperspectral Drone Imaging with Standard Gimbals & Flight Apps
Korea National University of Heritage needed to document large-scale cultural heritage sites using aerial hyperspectral imaging. This technology captures data across hundreds of spectral bands, detecting subtle differences in materials, vegetation, and surface conditions invisible to standard cameras.
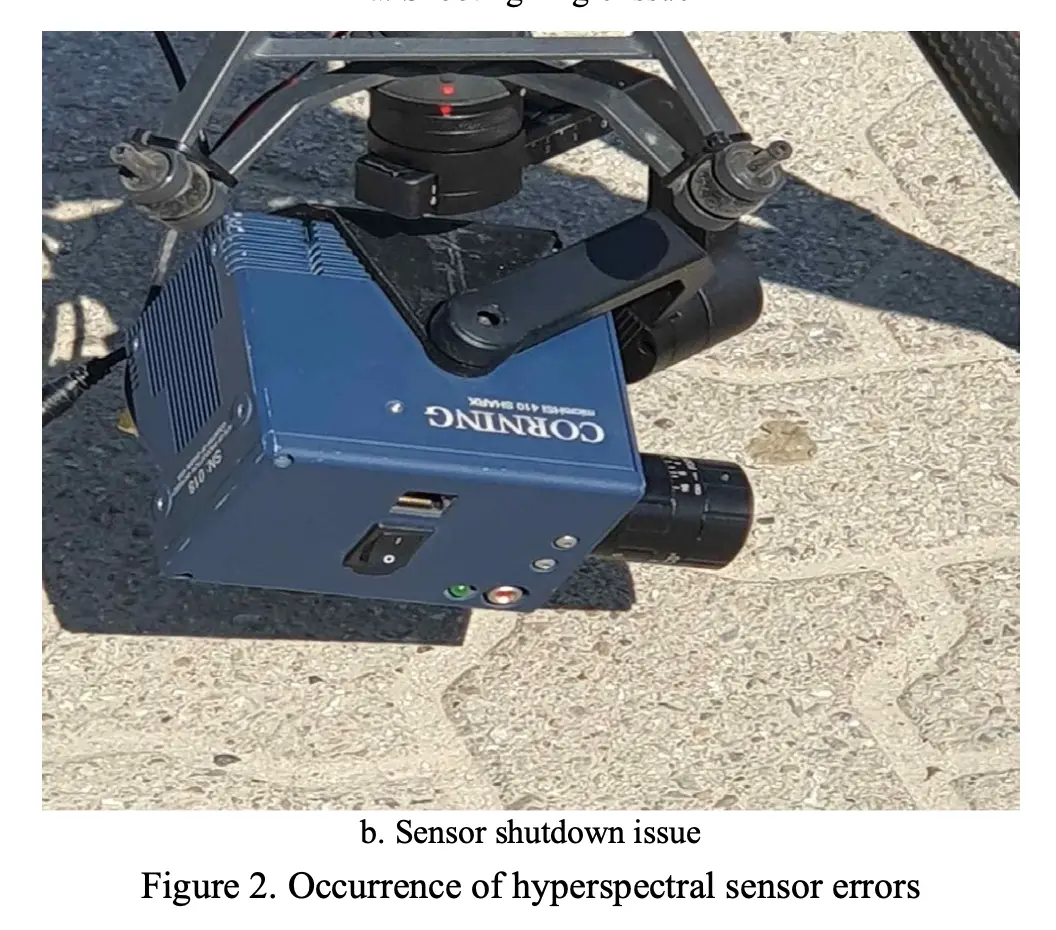
But hyperspectral sensors present unique challenges. They're heavier than RGB cameras, structurally complex, and equipped with focal plane array detectors extremely vulnerable to vibrations and shocks. Traditional fixed-angle brackets couldn't maintain stable imaging angles. The sensor weight and structural limitations caused both geometric and spectroscopic errors in the resulting images.
The research team set out to solve this through integrated system design: developing custom stabilization hardware and pairing it with flight control software precise enough to maintain stability during actual missions.
First Test: Why the Initial Hyperspectral Drone Setup Failed
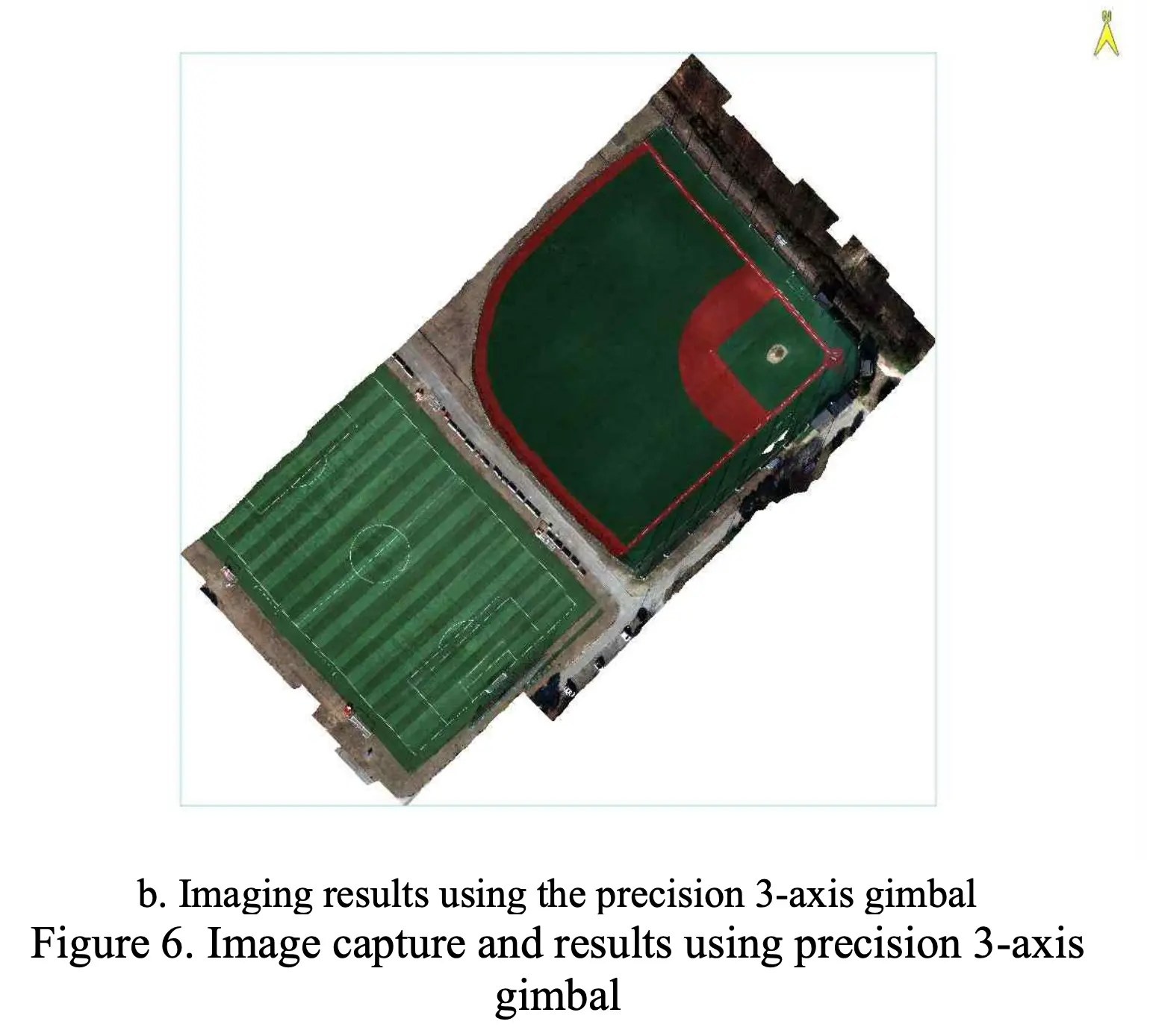
The team developed an initial precision 3-axis gimbal and tested it at Gangsang Sports Park in Yangpyeong-gun, Gyeonggi Province. Three problems immediately emerged:
Power system overload. Both the gimbal and hyperspectral sensor drew power from the drone's battery simultaneously. The battery had to support flight operations, gimbal attitude control, and sensor operations at once. The sensor would shut down mid-operation due to insufficient power capacity.
Mechanical misalignment. The central axes of the hyperspectral sensor and gimbal weren't properly aligned. This misalignment forced the system to consume excess power maintaining the desired imaging angle. The sensor would drift to unintended angles or image wrong areas entirely.
Motor performance during turns. The combined weight of sensor and gimbal affected motor response during turning maneuvers. When using DJI Pilot 2 for flight control, sudden acceleration and deceleration caused physical impacts to the gimbal. This led to angle instability, sensor shutdowns, and system overload.
The data problems were severe. Some strip images contained incorrect geolocation data. Others lacked the geometric information files needed for processing. Image alignment failed. Mosaicked results showed artifacts at seam lines. The collected data was unusable for professional analysis.
Solution: Integrated Gimbal and Flight Control Solution for Hyperspectral Drone Imaging
The breakthrough came from addressing hardware and software problems simultaneously. Neither component alone would have solved the issues.
Hardware Engineering: 3-Axis Gimbal for Hyperspectral Sensors

The team redesigned the physical system based on first-test findings:
External power separation. They developed a dedicated mounting system for an external battery attached to the drone's underside. The precision gimbal continued drawing power from the drone's battery. The hyperspectral sensor operated on the separate external battery. This eliminated power conflicts that caused mid-flight shutdowns.
Center of gravity alignment. Using the hyperspectral sensor as the reference point, they made physical axis adjustments to the precision gimbal. When the center of gravity aligns with the gimbal axis, the sensor adjusts to desired angles with minimal power consumption. Proper alignment was just as critical as power distribution for ensuring data quality.
Gap elimination and extended components. The original gimbal wasn't designed specifically for this sensor, creating a slight side gap that generated vibrations. The team made physical adjustments to eliminate this gap completely. They also extended the power cable and landing gear to accommodate the gimbal size and required imaging angles.
Software Selection: UgCS Flight Control
The hardware improvements created a mechanically stable platform. But stability means nothing if flight control software causes sudden movements that disrupt the sensor.
Why DJI Pilot 2 wasn't sufficient. Consumer-grade flight software offers an intuitive interface but provides limited functionality for detailed flight control. During turns, sudden deceleration and acceleration caused physical impacts to the gimbal, leading to imaging angle deviations and GPS data errors. The software couldn't prevent these sudden movements.
UgCS implementation. The team switched to UgCS for the second performance test at Gongsanseong Fortress. The software supports detailed parameter settings that DJI Pilot 2 doesn't allow.
They configured missions with:
- 5 m/s turning speed
- 15-degree turning angles
- 100-meter turning distances
These gentle parameters eliminated the sudden acceleration and deceleration that had caused gimbal impacts and sensor errors. UgCS maintained smooth, stable flight paths that kept the hyperspectral sensor at consistent imaging angles throughout entire missions.
Desktop planning advantage. UgCS runs on desktop computers, allowing operators to plan complex missions before heading to the field. The team could import terrain data, set exact altitude profiles, and visualize complete flight paths in 3D. For missions requiring precise sensor positioning across heritage sites with elevation changes, this desktop capability proved necessary.
Performance Testing: Gongsanseong Fortress
The complete integrated system underwent validation at Gongsanseong Fortress in Gongju, a historic cultural heritage site requiring professional-grade documentation.
System Stability Results
After implementing the external battery system and UgCS flight control, aerial hyperspectral imaging tests showed no instances of forced sensor shutdown from start to finish. This demonstrated the power separation had solved the capacity problems.
After aligning the center of gravity and eliminating physical gaps, no vibration issues occurred even after imaging sessions fully depleted both batteries. The mechanical stability held throughout complete missions.
The smooth turning parameters from UgCS prevented the physical impacts that had plagued earlier tests. The sensor maintained its intended imaging angle continuously.
Quantified Efficiency Results: Faster, Wider Hyperspectral Drone Surveys
Switching from DJI Pilot 2 to UgCS with the redesigned gimbal transformed aerial hyperspectral imaging performance: 61% shorter imaging time, 2.56× coverage, 54% better battery efficiency.
The research team redesigned both hardware (external battery, aligned gimbal) and software (switched to UgCS) simultaneously. The hardware changes eliminated sensor shutdowns, while UgCS's precision turn control prevented the sudden movements that caused data errors with DJI Pilot 2. Together, these improvements meant missions succeeded on first attempts instead of requiring multiple re-flights:
What These Numbers Mean
The 61% time reduction means field teams can survey more sites per day. Projects that required multiple days of data collection now complete in single efficient sessions.
The 2.56× coverage increase means each battery delivers more than double the surveying capacity. For large heritage sites spanning multiple square kilometers, this dramatically cuts project timelines and costs.
The 54% battery efficiency improvement means operators extract more work from each charge cycle. This matters particularly for remote heritage sites where charging infrastructure may be limited.
For teams running hyperspectral drone surveys over large heritage or environmental sites, this means fewer flights, less field time and higher-quality datasets per mission.
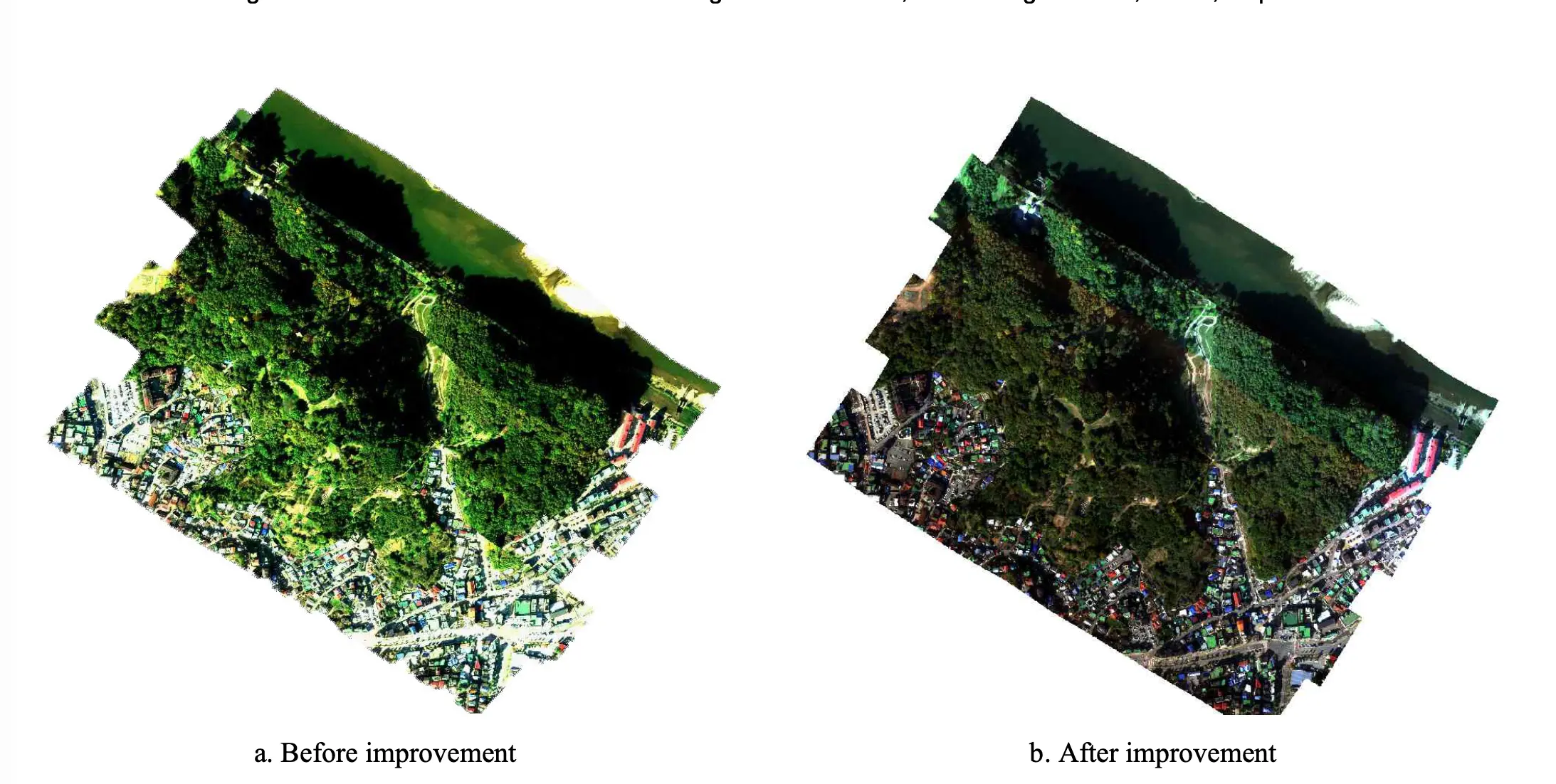
Data Quality Improvements
Beyond efficiency, the integrated system eliminated the data quality problems that made initial attempts unusable:
Clean GPS data. Every strip image contained accurate geolocation information. Processing software could align images correctly on first attempts.
Stable imaging angles. The smooth flight parameters prevented gimbal impacts. The sensor maintained intended orientation throughout flights.
Reduced seam artifacts. Consistent flight parameters meant better overlap between strips. Mosaicked images showed fewer alignment errors and cleaner transitions.
Shorter post-processing. With clean input data, photogrammetry processing completed faster and required less manual correction.
Research Team Assessment
The published paper provides detailed analysis of the results:
"The test results of this study empirically demonstrated that the mechanical stability of the precision gimbal system and the precision of flight planning exert a decisive impact on aerial hyperspectral image quality. In particular, once the center of gravity between the gimbal and the sensor was properly aligned, issues such as sensor malfunction and shutdown were fully resolved, highlighting that mechanical alignment is just as critical as power distribution in ensuring data quality."
On the flight software comparison:
"Changes in flight software also proved significant. While DJI Pilot 2 offered user convenience, it lacked fine control during turning maneuvers, compromising the stability of the imaging direction. In contrast, UgCS enabled fine-tuned adjustments to turning speed, radius, and effectively reduced image distortion caused by vibration and rapid acceleration during imaging.
As a result, seam artifacts in mosaicked images were reduced, and post-processing time was shortened."
On the complete system integration:
"The separated power system also proved to be practically important. When the hyperspectral sensor was powered by an external battery, not only was the power supply stabilized, but the imaging duration was shortened by more than 60%, and sensor malfunctions rarely occurred. This suggests that when handling complex sensors, a single shared power supply can undermine the overall system's performance."
Technical Configuration
Drone Platform: DJI M300 RTK
Sensor: Corning hyperspectral imaging system
Stabilization: Custom precision 3-axis gimbal with aligned center of gravity
Flight Planning: UgCS desktop software
Power System: Separated dual battery configuration
Test Locations:
- Calibration site: Gangsang Sports Park, Yangpyeong-gun, Gyeonggi Province
- Performance validation: Gongsanseong Fortress, Gongju
UgCS Mission Parameters:
- Turning speed: 5 m/s
- Turning angle: 15 degrees
- Turning distance: 100 meters
- Planning interface: Desktop with terrain data import
- Mission type: Area survey with precision turn control
Applications Beyond Heritage Conservation
The research team identified broader applications for precision hyperspectral imaging with integrated stabilization and flight control:
Environmental monitoring for detecting ecosystem changes, water pollution, and invasive species. The stable platform enables accurate spectral data acquisition that can identify environmental stress or contamination through subtle spectral signatures.
Precision agriculture for early diagnosis of crop diseases, nutrient deficiencies, and drought stress. Detailed reflectance patterns at canopy level support optimized farming decisions when captured with consistent sensor positioning.
Forestry management for spectral mapping of forest health, biomass estimation, and post-disaster assessment. The repeatable flight paths enable monitoring changes over time with comparable data quality.
Infrastructure inspection for detecting material degradation or thermal anomalies in buildings, roads, and structures. The stable imaging angles produce consistent data suitable for quantitative analysis.
All these applications share the requirement for stable, precise flight paths maintaining consistent sensor positioning throughout data collection.
Key Insight: System Integration Delivers Results
This research demonstrates that precision aerial sensing requires integrated solutions. Hardware improvements alone didn't solve the problems. Software improvements alone wouldn't have worked either.
The breakthrough came from combining mechanical engineering, electrical engineering, and flight control precision. Each component addressed specific failure points identified in first-round testing:
- Gimbal design and alignment solved the mechanical stability
- Power separation eliminated mid-flight shutdowns
- UgCS parameter control prevented impact-causing movements
Together, they created a stable platform for professional-grade hyperspectral imaging. The research team proved empirically that both mechanical stability and flight planning precision impact data quality in aerial hyperspectral imaging.
For operators working with sensitive sensors or mission-critical data collection, this validates that system integration matters as much as individual component quality.
Conclusion
Korea National University of Heritage and GEOSTORY Co. Ltd solved a complex aerial imaging problem through integrated engineering. By combining custom hardware development with UgCS precision flight control, they achieved 61% faster imaging, 2.56× coverage increase, and eliminated the sensor failures that had made their initial approach unusable.
The research offers a clear lesson: professional sensor operations need professional flight control. Consumer flight software works for basic missions. For hyperspectral imaging, LiDAR surveying, or any application where data quality is critical and sensors are sensitive, precision flight planning makes the difference between failed missions and reliable results.
Published Research: Lee, J.S., Yoo, S.J., Song, D.Y., Choi, K.H., Lee, J.Y., Kim, C.S. (2025). "Development of a 3-Axis Gimbal for Drones to Improve Hyperspectral Imaging Quality of Large-Scale Natural Heritage." The International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences, Volume XLVIII-M-9-2025, pp. 799-804.
Try UgCS for precision sensor missions. Desktop planning and fine parameter control for professional results.
