

Background
As part of an ice jam flooding research initiative, Université de Sherbrooke investigated how drone-based GPR could support safer and more efficient ice surveying. The team deployed a 500 MHz GPR antenna on both a DJI M300 RTK drone and a buggy across the Au Saumon River in southern Québec, which is covered in stable winter ice.
The goal was to determine whether airborne GPR could produce reliable ice thickness data, potentially extending coverage to areas where cart-based surveys would be unsafe.

Disclaimer
The term "detected" here means that the data interpreter has identified a strong enough signal that warrants further examination or action. Interpretations are subjective and will change depending on the experience and knowledge of the interpreter.
Neither SPH Engineering SIA nor Radar Systems Inc. makes any claims or warranties that detection of the same or similar targets is guaranteed under conditions other than at a particular test site using the same or different hardware, software, and workflow.
This report is provided "as is" and is intended to demonstrate the capabilities of the system described herein and provide some guidance for planning Ice and Bathymetry profiling surveys.
Challenges
Surveying ice-covered rivers presents a unique combination of hazards, environmental limits, and technological trade-offs. This field test provided insight into the strengths and weaknesses of each method under real conditions.
- Field Safety. Traversing river ice with equipment is inherently dangerous. While the test area had solid ice, ice jams are unstable and dangerous to walk on. Drone-based surveying eliminates the need to place people in risky locations.
- Environmental Conditions. Snow depth affects equipment choice. On the day of the test, the snow on the ice was shallow (~5–10 cm), so the cart worked well. But if the snow had been deeper (e.g., 2 feet), the drone would have been preferable to avoid shoveling paths for the buggy.
- Control and Precision. Flying the drone close to the ice surface required constant monitoring. A drone operator walked beside it to ensure it didn't drift into trees or brush along the riverbanks, particularly when crossing to the far side.
Solution
The survey used two deployment methods for the same GPR antenna to gather data over matching transects on the river ice:
- Drone-Based GPR. A DJI M300 RTK equipped with SPH Engineering’s 500 MHz GPR integrated system flew low-altitude passes over the frozen river. RTK ensured accurate path repeatability. This configuration allowed safe coverage across the full river width, including areas unreachable by foot.

- Cart-Based GPR. The same antenna was mounted on a manually pulled buggy. This method provided direct contact with the ice surface, supporting strong signal coupling and minimal setup in accessible locations. It served as a baseline to compare with drone data.

- Reference Measurements:
- 25 holes were manually drilled. GNSS coordinates and water depth at each hole were recorded.
- An additional shallow water ice profiler was installed prior to freeze-up at the site. It measured ice thickness and water level at one location continuously through the winter. The unit, however, is stationary and complex to deploy, requiring divers to recover it.

Data processing
Initial data processing for both the 1.0 m and 0.75 m AGL (Above Ground Level) airborne GPR datasets was performed using GeoHammer Pro v2.0.7. In this stage, the flight paths were segmented into individual profiles and exported, which significantly streamlined subsequent data handling. After exporting the airborne GPR profiles, further processing of both airborne and ground-based (cart-mounted) GPR data was carried out using the GPR processing software Prism v2.70.06, as well as the online platform Geolitix.
All of the datasets followed the same steps of data processing, which consisted of applying time-dependent signal gain to better see reflections, applying GPS corrections and signal/noise filters as shown in Table 1.
Table 1. GPR data processing steps in Prism v2.70.06
To estimate the dielectric permittivity, an approach was used where the average ice thickness was used to calibrate the radargrams. The permittivity value was adjusted so that the depth scale of the radargrams matched known thickness measurements. To accurately define the ice–water boundary, the Trace Inspection tool was used. This tool allows for precise analysis of signal amplitudes as a function of depth (Figure 1).

Data visualization and results
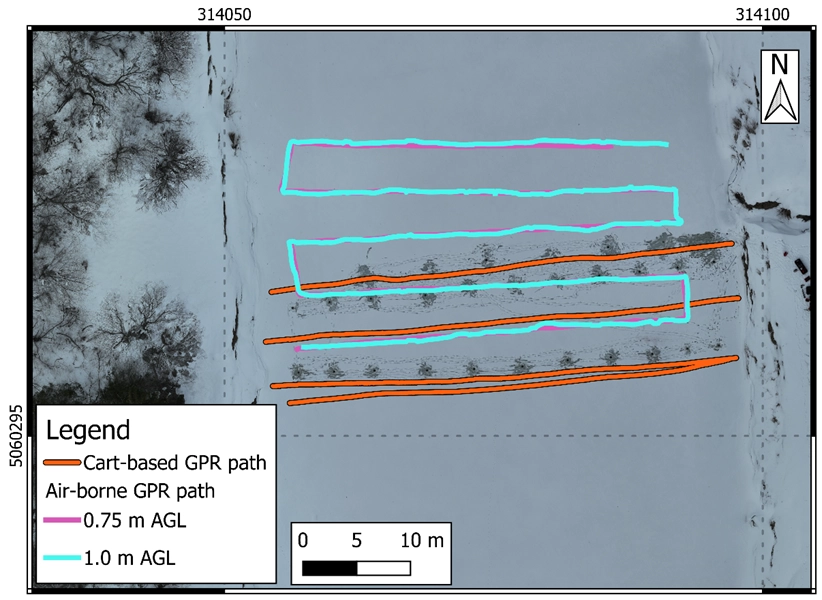
After processing all the acquired data, an interpolation was done to make an ice thickness grid. For better visualization, the ice thickness grid was exported to QGIS v3.34, where it was combined with a previously acquired orthophoto map of the survey area and data acquiree paths (Figure 2). As expected, ice is visibly thicker at the sides of the river, where the speed of the water is slower, thus allowing for water to freeze quicker. For comparison, both airborne and cart-based GPR data are presented in Figures 3, 4, and 5. Some artifacts visible in the grids result from interpolation rather than actual subsurface anomalies.
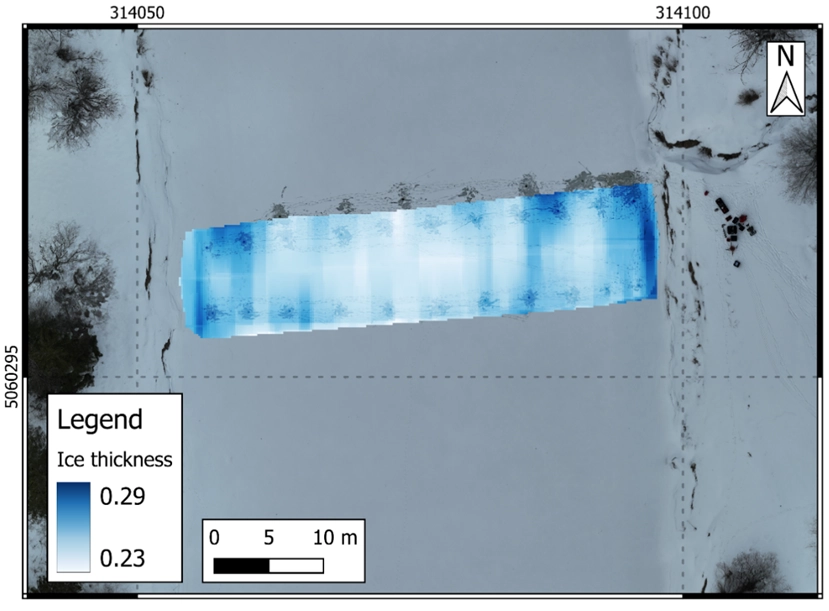
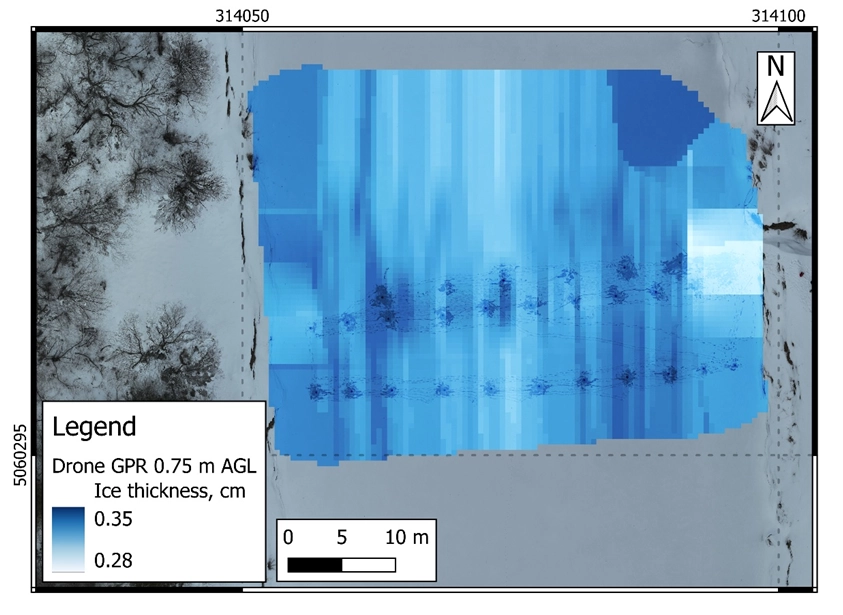
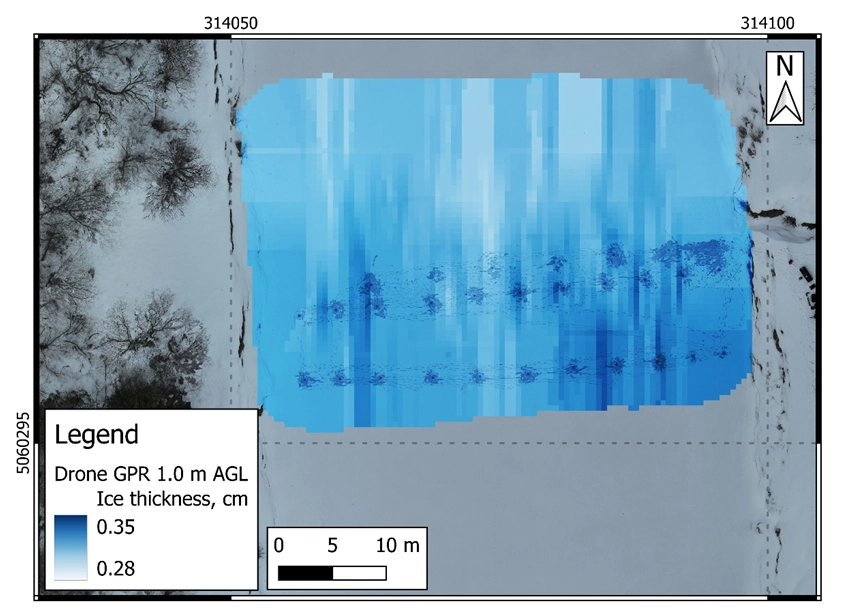
Although ice depth varies across locations, it remains largely consistent between the airborne and cart-based GPR datasets. Ground-based GPR systems generally offer higher credibility due to their direct coupling with the ground. However, airborne GPR provides a much faster and safer alternative while still delivering reliable results. For both systems, it is highly recommended to drill separate ice boreholes, enabling data interpreters to estimate dielectric permittivity using an approach where the average ice thickness is employed to calibrate the radargrams.
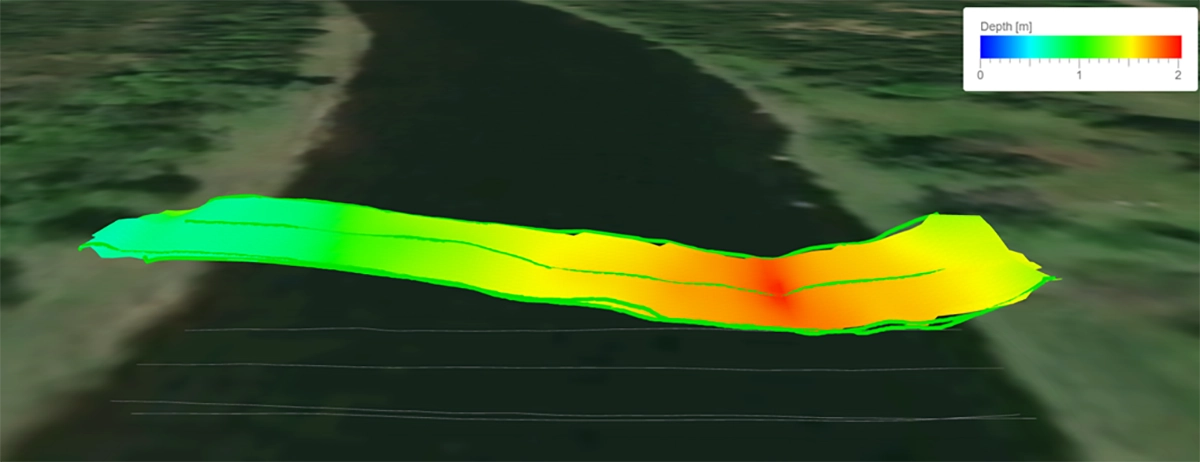
Given the high resolution of the acquired data, we can also map the riverbed using Geolitix by interpreting the bed reflections and generating a corresponding depth grid (Figure 6).
Conclusion
Overall, the use of Ground Penetrating Radar (GPR) to estimate ice depth over a large survey area is effective, especially when supported by multiple ice boreholes to validate and calibrate the data. The drone-based (airborne) GPR system performed well and did not exhibit any limitations that would prevent it from achieving results comparable to those of ground-based GPR. The ground-based system produced high-resolution data, enabling the successful mapping of the underlying riverbed and the creation of a detailed depth grid.
The drone setup showed clear value in risk reduction and extended reach, despite requiring careful planning and in-flight monitoring. The accompanying dataset from 25 drilled holes and a fixed ice profiler will enable validation of radar-based interpretations.
This trial underscores the potential of drone-based GPR for supporting ice-related flood modeling. It opens the door for future use in dynamic river environments where access is limited and continuous data is needed.