

Quick Facts
- Partner: Altomaxx
- Application: Ferrous debris detection and hazard mapping in an active mining operation
- Challenge: Metal debris entered the rock crusher, causing equipment damage and production shutdowns
- Solution: Drone-mounted magnetometry survey using MagDrone R3 on a DJI M300 with DJI RTK base station, SkyHub onboard computer and UgCS drone flight planning software
- Key Result: Small ferrous targets successfully detected at depths up to 3.5 meters through crushed rock ranging from wallet-sized stones to boulder-sized material
Background: Metal Debris Threatening Equipment at an Active Open-Pit Mine
At the subject mine, recurring production stoppages traced back to metallic debris entering the rock crusher. Loader bucket teeth, baseball-sized components made of hardened steel, mixed into the material stream and damaged critical processing equipment. The mine needed a method to scan rock piles and identify buried ferrous debris before the material entered the crusher, without interrupting active mining operations.
The Challenge: Detecting Buried Ferrous Debris in Active Mining Operations
The operational area presented significant practical constraints. Rocky terrain and heavy machinery in constant operation made manual inspection hazardous and impractical. A handheld metal detector was evaluated and ruled out: the scale of the debris field and the presence of large volumes of crushed rock made ground-level scanning by personnel both inefficient and unsafe.
The core technical challenge was detecting small ferrous objects buried within dense crushed rock at variable depths, across a large surface area, while mining operations continued nearby. The solution also needed to deliver precise location coordinates, not just a detection signal, to allow targeted removal of debris before it reached the crusher.
The Solution: Automated Grid Survey with Drone-Mounted Magnetometer and RTK Positioning
After evaluating the site layout, operations, and sample debris, the team established a staging area and assembled the drone magnetometry system for flight.
The key components were:
- DJI M300 Drone: the UAV platform carrying the magnetometer payload, enabling data capture while keeping personnel clear of the debris field and supporting precise automated flight planning across the full operational area.
- DJI RTK Base Station: provided enhanced GPS positioning accuracy for precise mapping of detected target locations.
- SENSYS MagDrone R3 Magnetometer: a drone-mounted fluxgate magnetometer payload, configurable and operational within minutes of setup.
- SkyHub Onboard Computer: the onboard processing unit managing sensor data collection and georeferencing during flight.
- UgCS: the flight planning and mission control software used to execute the automated grid survey.
The team created a grid flight plan covering both X and Y quadrants and uploaded it to the drone base station. Using a laser altimeter, the drone navigated to its first waypoint and flew the complete grid while following terrain elevation. The M300 returned to its start point automatically on completion.
The initial test buried steel debris samples at six inches depth to confirm basic detection.
A more demanding test then followed: a heavy-duty loader buried target examples at depths of one to five meters across multiple locations. Crushed rock ranging from wallet-sized stones to boulder-sized material covered the targets to replicate real operating conditions. The same flight plan ran over the expanded test area.


Results: Detecting Ferrous Targets Up to 3.5 m Deep
After completing the grid flights, the team examined the dataset. In the initial six-inch burial test, the system confirmed and mapped target locations, depths, and magnetic field strengths without issue.
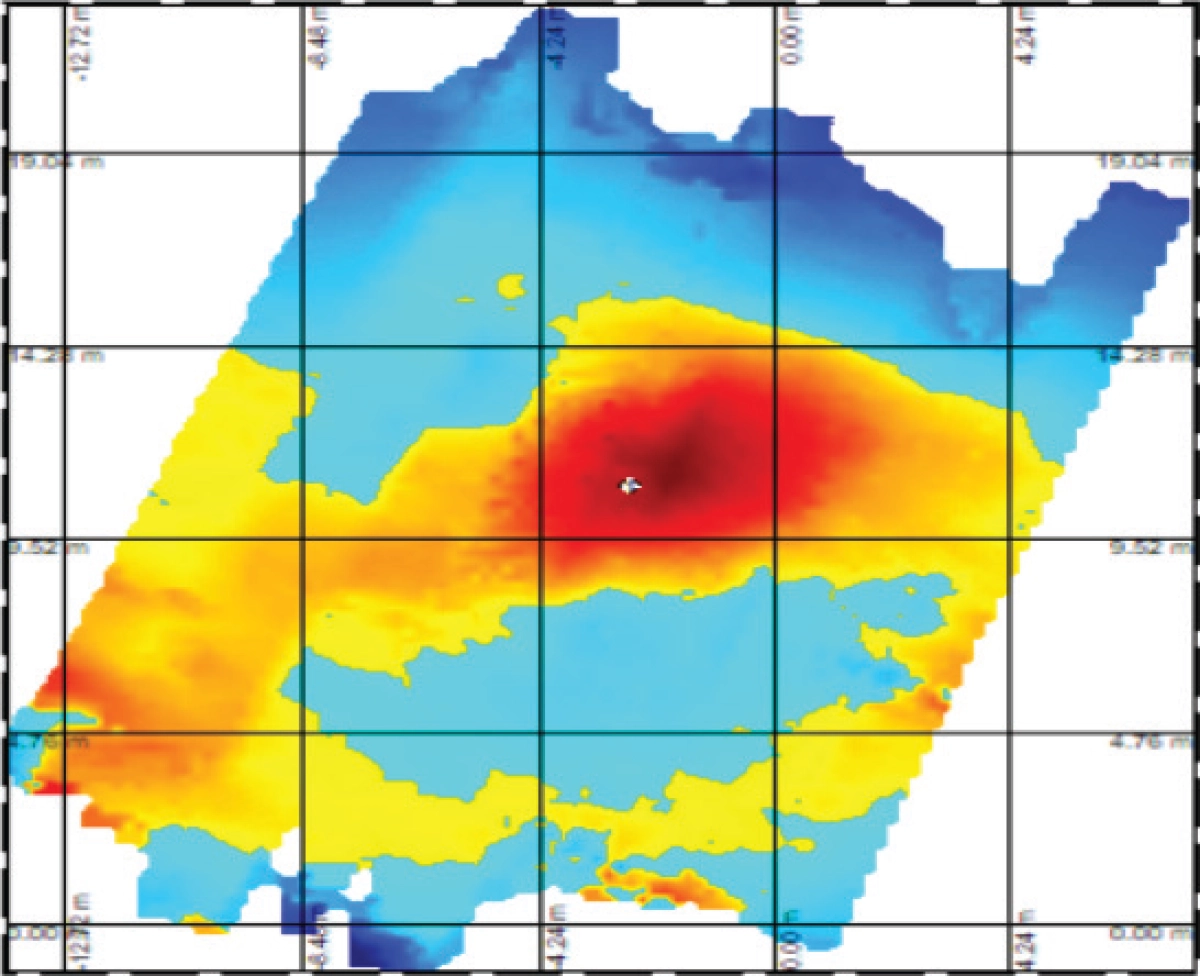
In the more demanding test, with targets buried one to five meters deep under heavy crushed rock, the drone magnetometer survey detected relatively small ferrous targets at depths up to 3.5 meters. The report notes that larger ferrous targets would exceed the 3.5-meter threshold, given the sensor's performance on the smaller test items.
RTK base station integration delivered pinpoint location accuracy across the survey area. The SENSYS software output produced a clear, easy-to-interpret dataset with precise magnetic location coordinates and signal return values for each detected target.
Conclusion: Drone Magnetometry Proves Viable for Industrial Debris Detection
This project confirmed that drone-based magnetometry is a viable and practical method for detecting buried ferrous debris in active open-pit mining environments. The approach also removes the safety risks that come with manual scanning in active industrial zones, addressing both the equipment protection problem and the human safety concern at the same time.
This workflow offers a replicable template for debris detection and hazard identification across mining and other heavy industrial environments.