
Mission Summary
Research type: Drone Photogrammetry for Scientific Weather Research
Challenge: Measure thousands of hailstones with millimeter accuracy across uneven terrain before they melt.
Solution: UgCS planned low-altitude, terrain-following missions at 8 m AGL (vs. 12 m in prior research) for consistent 1mm/px photogrammetry resolution.
Results:
- 98% detection accuracy in controlled experiments
- 81% accuracy in real storm conditions
- Average error below 1mm for synthetic objects
- ~4,000 hailstones captured in flight lasting 1m 49s
Team: MeteoSwiss & ETH Zürich
Publication:Frontiers in Environmental Science, Sept 2025
The Problem Nobody Could Solve: Ground Truth Data for Hail Size Measurement
Accurate hail size measurements are critical for weather research, and weather radar estimates hail size from thousands of feet up. But it can't tell you what's actually hitting the ground. Current ground truth methods have serious gaps:
- Hail pads require manual collection with no timing data
- Automatic sensors cover only 0.2 m² and record 10-80 impacts per event
- Crowd reports are biased toward populated areas
- Weather radar provides indirect estimates at ~1 km² resolution
None of these deliver what scientists need: representative hail size distributions across large areas with millimeter-accurate measurements.
In June 2022, after a severe hailstorm in Locarno, Switzerland, researchers had 20 minutes before the hailstones melted. They needed to capture and measure thousands of individual hailstones across 220 m² of uneven meadow.
The entire methodology hinged on one question: Could drone photogrammetry deliver 1mm-per-pixel resolution over changing terrain?
Why 1mm/px Resolution Mattered
Photogrammetry accuracy depends on Ground Sampling Distance - how many millimeters each pixel represents.
At 1 mm/px, a 10 mm hailstone spans 10 pixels. You can measure diameter, detect edges, distinguish it from grass or flowers. At 1.5 mm/px, that same hailstone shrinks to 6.7 pixels. Edge detection becomes fuzzy. Small hailstones disappear into pixel noise.
The experiments proved this wasn't theoretical. Small hailstones (≤15mm) were already the hardest to detect at 1mm/px. Lower resolution would push the detection threshold higher, cutting off the data the research was designed to capture.
With a DJI Zenmuse P1 camera (45MP, 35mm lens), achieving 1 mm/px requires flying at 8 meters above ground level.
Prior hail photogrammetry work (Lainer et al., 2024) used DJI Pilot 2, which enforces a 12 m AGL minimum, resulting in approximately 1.5 mm/px resolution, about 50% larger pixel size.
How UgCS Low-Altitude Flight Planning Solved the Resolution Challenge
UgCS supports low-altitude flight planning as low as 5 m AGL. The team executed controlled experiments at 8 m AGL, achieving the 1 mm/px resolution their methodology required.
But altitude is only half the equation. The other half is maintaining that altitude consistently across uneven terrain.
Terrain-Following for Uniform Resolution
If the drone climbs from 8 m to 12 m over a hill, the resolution degrades from 1mm/px to 1.5mm/px. Hailstones on that hill get measured with different pixel sizes than those in the valley. That inconsistency complicates analysis and affects data quality.
Manual altitude adjustment wasn't practical. For precision mapping applications requiring consistent resolution, automated terrain following eliminates human error and ensures data uniformity. The pilot would need to react faster than human reflexes while maintaining consistent speed and camera angles.
The team used UgCS terrain-following with 0.5 m resolution Digital Elevation Models to automatically generate 3D flight paths maintaining constant AGL. The research paper documents this: "This allows the drone to maintain a constant altitude above ground level (AGL), which is essential for a uniform ground sampling distance (GSD)."
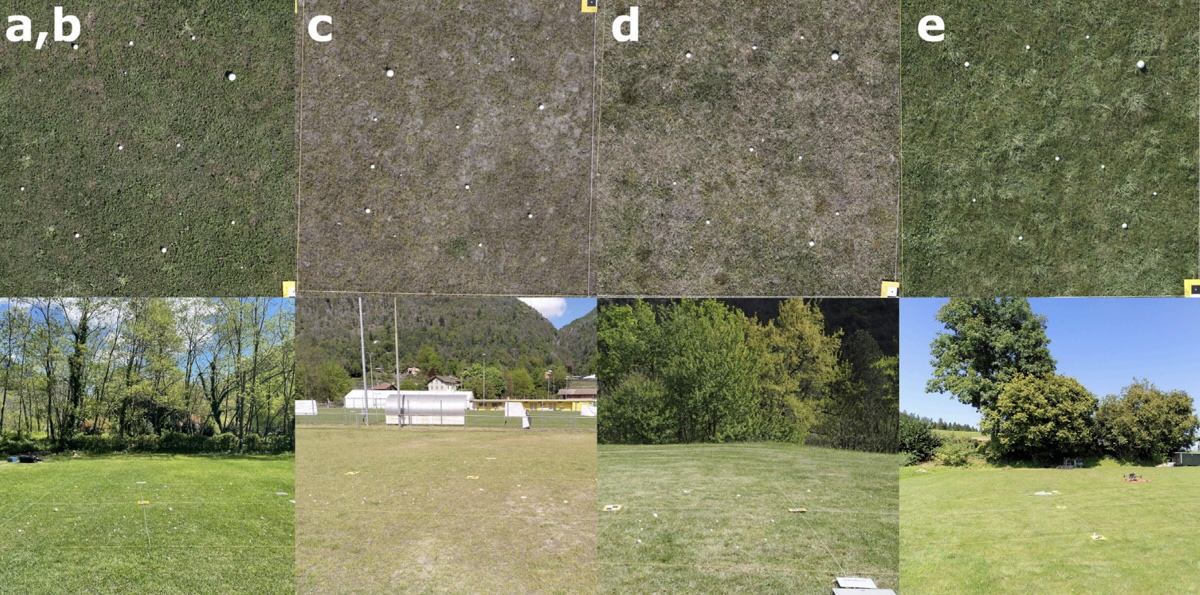
The Locarno survey covered 220 m² of uneven meadow. The validation experiments covered five different sites with varying terrain. Terrain-following improved uniformity across all of them.
Testing Against Known Ground Truth
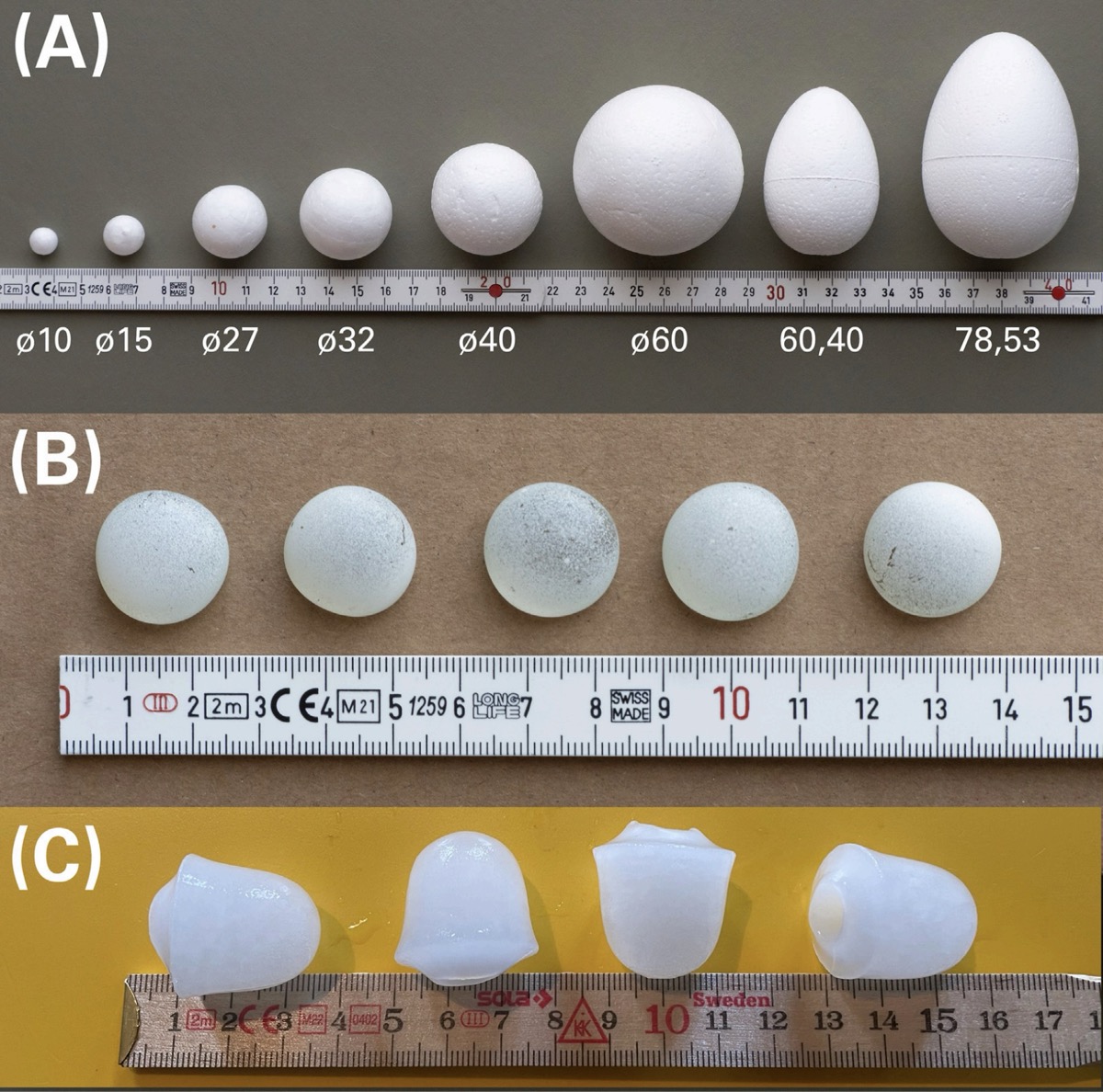
Real hailstones melt. Their true size becomes unknowable. So the team conducted systematic experiments with synthetic objects. EPS spheres, painted glass pebbles, and ice cones, of precisely measured sizes.
They placed 50 objects of known diameter, flew photogrammetry missions at 8 m AGL, processed orthophotos at 1 mm/px, ran ML detection, and compared detected sizes to actual sizes. They repeated this across five different grass surfaces.
The controlled experiment results:
- 98% detection rate
- Average error below 1 mm (mean bias: -0.75 ± 1.6 mm) across all sizes (10-78 mm)
- Smallest errors for opaque objects
- Slightly higher errors (2-3 mm) for translucent ice and glass due to reduced contrast
For context: automatic hail sensors use 5 mm size classes due to ~20% measurement uncertainty. The drone photogrammetry method achieved comparable or better accuracy while covering areas hundreds of times larger.
This represents the first systematic validation for UAV-based hail photogrammetry using synthetic ground truth.
Field Validation: Capturing 4,000 Hailstones in Real Storm Conditions
The real hail event in Locarno presented challenges that synthetic experiments couldn't replicate:
- Low light from thunderstorm cloud cover
- Translucent, irregularly shaped hailstones
- Clover flowers resembling hail
- 19-minute delay before survey (ongoing melting)
- Rough, irregular grass surface
The team flew at 12 m AGL (higher than experiments for safety), yielding 1.5 mm/px resolution. The 1m 49s flight captured imagery that, after processing, revealed approximately 4,000 individual hailstones. ML detection achieved 81% accuracy, strong given the conditions, with mean bias at -0.79 ± 1.5 mm.
Automatic sensors would have recorded perhaps 50 impacts over 0.2 m². The methodology delivered statistically significant sample sizes no other ground truth method could match.
UAV Photogrammetry Processing: From Flight to ML Detection
The Locarno flight captured 44 overlapping images. Processing used OpenDroneMap to generate:
- 3D point cloud from structure-from-motion
- Textured 3D mesh of the survey area
- Orthophoto at flight GSD (1mm/px for experiments, 1.5mm/px for real event)
Then came the ML pipeline: image tiling, expert annotations, Mask R-CNN training, threshold tuning, and masking of non-target areas.
It wasn't turnkey. But the entire pipeline depended on photogrammetry quality. Lower resolution orthophotos mean lower detection rates and larger size estimation errors. UgCS delivered the flight planning precision that made clean data collection feasible.

Factors Affecting Drone Photogrammetry Accuracy in Hail Surveys
The research showed multiple factors affect results:
- Resolution: 1 mm/px vs. 1.5 mm/px affects detection capability
- Lighting: Low light reduces contrast and detection rates
- Surface type: Grass length affects occlusion of small hailstones
- Object characteristics: Translucent objects show higher measurement errors
- Time delay: Melting between hail strike and survey reduces measured sizes
The controlled experiments optimized what they could control. That's how they achieved 98% detection. Real-world conditions are messier, the 81% in Locarno reflects that reality while still exceeding existing methods.
Desktop Planning for Field Precision
The paper makes a general observation about large-scale survey planning: "planning 200+ km corridor scans on tablet screens is difficult." While not specific to the hail experiments, this reflects the value of desktop capability for scientific work requiring precise parameters, terrain analysis, and repeatability across sites.
UgCS provided:
- Exact control over flight patterns, altitude, speed, camera angles, and overlap
- DEM integration for precise AGL maintenance
- Mission templates for identical parameters across five experimental sites
- Pre-flight validation with elevation profiles and 3D visualization
The team used these capabilities to execute consistent photogrammetry missions across varied terrain conditions.
Comparative Context: UgCS vs. DJI Pilot 2 Flight Altitude and Resolution
The paper documents differences between approaches:
Prior research (2024):
- DJI Pilot 2 flight planning
- 12m AGL minimum
- ~1.5 mm/px resolution
- 750 m² surveyed
Current study experiments:
- UgCS flight planning
- 8 m AGL (supports as low as 6m)
- 1 mm/px resolution
- 98% detection validated against synthetic ground truth
These findings reflect different mission contexts - events, lighting, surfaces, and timing varied. But the altitude capability difference is documented: DJI Pilot 2's 12 m minimum resulted in ~1.5 mm/px in prior work; UgCS enabled 8 m for 1 mm/px in these experiments.
Results: Millimeter-Accurate Hail Measurement with Drone Photogrammetry
MeteoSwiss needed millimeter-accurate measurements of thousands of hailstones before they melted. The methodology required 1 mm/px photogrammetry resolution over uneven terrain.
UgCS was used to plan the low-altitude, terrain-following missions that made 1 mm/px data feasible, below the 12 meter threshold in previous research, with consistent resolution maintained across uneven survey areas.
The results: 98% detection accuracy in controlled experiments with average error below 1mm, and 81% accuracy in real storm conditions, capturing ~4,000 hailstones.
The full pipeline requires expert photogrammetry processing, annotation, ML training, and validation. But it starts with flight planning that delivers the altitude control and terrain-following needed for clean data collection.
Technical Specifications and Equipment
Experiments:
- Platform: DJI M300 RTK + Zenmuse P1 (45MP)
- Flight altitude: 8 m AGL, 1 mm/px GSD
- 0.5 m DEM terrain-following
- Test surfaces: 5 different grass types
- Detection accuracy: 98%
Real Event (Locarno, June 2022):
- Flight altitude: 12 m AGL, 1.5mm/px GSD
- Survey area: 220 m² surveyed in 1m 49s flight
- Hailstones detected: ~4,000
- Detection accuracy: 81%
Software:
- Flight planning: UgCS with terrain-following
- Photogrammetry processing: OpenDroneMap
- Machine learning: Mask R-CNN for object detection
Research Team: MeteoSwiss & ETH Zürich
Publication: Portmann et al. (2025), Frontiers in Environmental Science 13:1602917
Research by Jannis Portmann, Martin Lainer, Killian P. Brennan, Marilou Jourdain de Thieulloy, Matteo Guidicelli, and Samuel Monhart.
COPYRIGHT © 2025 Portmann, Lainer, Brennan, Jourdain de Thieulloy, Guidicelli and Monhart. This is an open-access article distributed under the terms of the Creative Commons Attribution License (CC BY). The use, distribution or reproduction in other forums is permitted, provided the original author(s) and the copyright owner(s) are credited and that the original publication in this journal is cited, in accordance with accepted academic practice. No use, distribution or reproduction is permitted which does not comply with these terms
