
Client: Geological Survey of Norway (NGU)
Date: September 22, 2025
The Challenge: Precision Mapping in Rugged Terrain
The Geological Survey of Norway (NGU) targeted graphite deposits in the steep, rugged landscape of Sortland, Vesterålen. They faced a critical challenge - the ground itself was the biggest variable. Manually flying a drone at a low, constant altitude over this terrain was impossible. The mission required a level of automation and terrain intelligence that standard flight planners could not provide.
This is the technical story of how NGU combined a high-sensitivity magnetometer with the advanced terrain-following capabilities of UgCS to execute a survey that would have otherwise been grounded.


At a Glance
Objective: Mapping Graphite Deposits with High-Resolution Magnetic Data
The primary goal for NGU was to produce detailed, high-resolution magnetic maps of known magnetic lows associated with graphite deposits. This data is used to map geological contacts, identify structural features, and understand variations in the bedrock geology.
To achieve this, the team needed to fly a sensitive three-component fluxgate magnetometer over a large and topographically complex area. The success of the entire project depended on collecting clean data by maintaining a strict 35-meter altitude above ground level throughout all 436 survey lines.
The Technology Stack
- Aircraft: A DJI M300, selected for its flight time and payload capacity.
- Sensor: The SENSYS MagDrone R3, a lightweight magnetometer ideal for detecting weak magnetic anomalies. It was mounted between the drone's landing gear.
- Flight Automation: UgCS Mission Planning Software.
- Ground Control: A base magnetometer (GEM GSM-19) was used to record and correct for diurnal variations in the Earth's magnetic field.
The central challenge was programming a flight path for the DJI M300 that could navigate the terrain of the Vik and Froskeland areas, which featured both flat plains and steep inclines.

How UgCS Enabled Automated Terrain Following
The mission's viability came down to one critical software feature: automated terrain following.
The NGU team used UgCS to solve the flight path problem. They directly imported a 10-meter resolution Digital Elevation Model (DEM) of the survey areas from Hoydedata.no into the software. With this data, UgCS automatically generated flight plans that precisely followed the ground's contours, a function known as "topographic draping."
This automation was the enabling factor for the entire project. It ensured the drone maintained the required 35-meter AGL with a precision that manual piloting could never achieve in such an environment. The flight paths were planned perpendicular to the orientation of the graphite deposits to maximize data quality.
Field Lessons and Data Integrity
Complex geophysical surveys are never simple. The NGU mission confirmed that success requires adapting to both hardware and environmental challenges.
The team had to manage the magnetometer's independent battery, performing swaps mid-day to ensure no data was lost during the 75 flights. More seriously, the project was cut short after the drone experienced two separate crashes due to a recurring mechanical failure. While unrelated to the flight planning, these incidents highlighted a crucial lesson noted in the official report: for critical fieldwork in remote locations, having a backup drone is essential.
These real-world events show that even with perfect flight automation, expert field crews must plan for hardware contingencies.
Raw magnetic map showing flight lines before processing. The stable flight paths from UgCS provided a clean baseline for data correction.
Results: Clean Data and Accurate Magnetic Maps
A stable flight path is the first step in a rigorous data processing chain. UgCS provided the clean input data NGU needed to produce accurate final maps.
- Stable Data Acquisition: By maintaining a constant 35-meter AGL, UgCS ensured the magnetometer collected a consistent raw dataset with minimal altitude-related noise.
- Noise Reduction: The raw data was captured at 200 Hz. This was later down-sampled to 1 Hz (one acquisition per second), which significantly cleaned the signal without losing necessary detail.
- Correction for Drone Interference: The magnetometer's proprietary software was used to compensate for the magnetic influence of the drone's own metallic components.
- Temporal and Geomagnetic Corrections: The data was corrected for diurnal variations using the base station magnetometer. Finally, the International Geomagnetic Reference Field (IGRF) was subtracted to isolate the local magnetic anomalies.
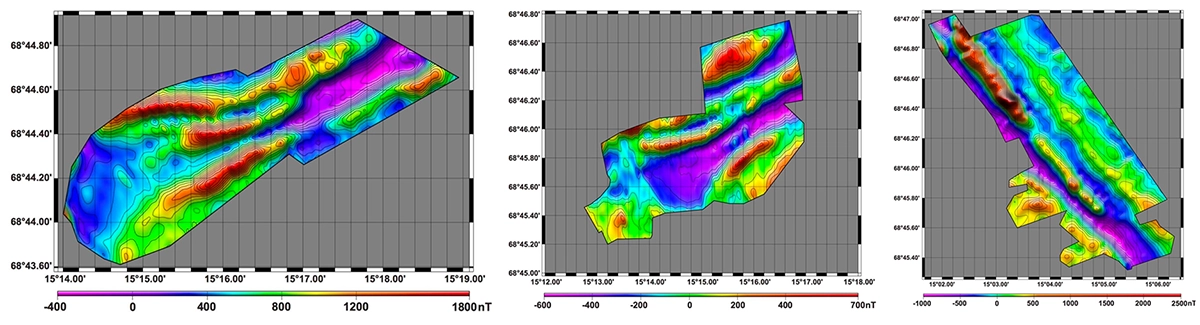
This systematic process turned the raw flight data into the final, high-resolution magnetic anomaly maps that were the project's primary goal.
Conclusion: A Mission Made Possible by Terrain Following
The NGU survey in Sortland demonstrates the critical role of advanced flight automation in modern geophysical exploration. The combination of a reliable drone, a sensitive sensor, and an expert field team laid the foundation for success.
However, the team's official report contains a clear and powerful conclusion. The unique challenges of the landscape presented a problem that only specialized software could solve. The final assessment of UgCS's role was unambiguous:
“The survey was conducted using UGCS software, which enabled topographic draping and allowed the drone to maintain a constant altitude above the complex terrain. Without this software, navigating the rugged landscape would have been impossible.”
In the world's most demanding environments, success is a function of a complete system. That system requires intelligent flight automation, rigorous data science, and the irreplaceable expertise of a field crew. In this survey, UgCS was the tool that connected the drone to the difficult landscape, making the entire operation possible.
This article was created based on the NGU Report 2024.038, "Drone-borne aeromagnetic survey in Sortland, Vesteralen," authored by Florent Szitkar. Published with permission.