

Quick Facts
- Organizations: SINTEF; Norwegian Geotechnical Institute (NGI); Norwegian Public Roads Administration; Université Grenoble Alpes
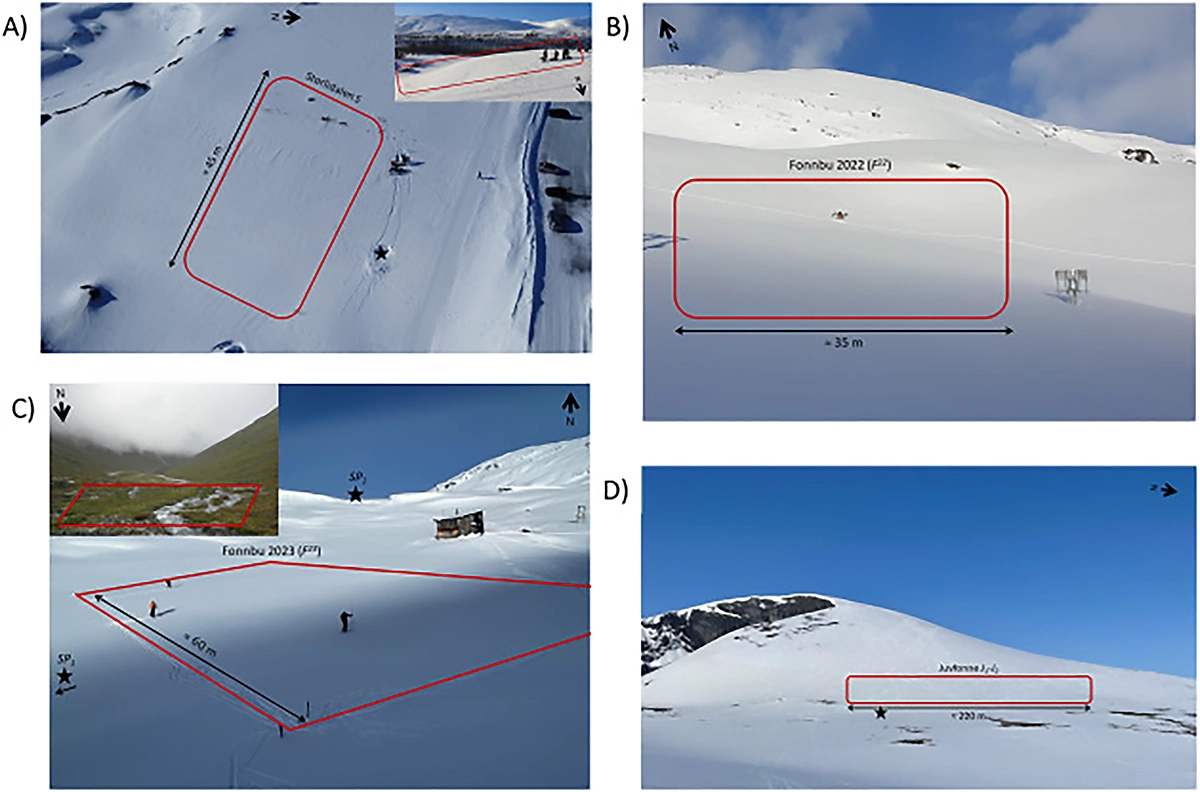
- Location: Central and Western Norway
- Challenge: Repeatable snowpack characterization in steep and avalanche-prone terrain
- Solution: UAV-borne GPR surveys using multi-frequency antennas with SkyHub onboard computer and UgCS drone flight planning software
- Key Result: Demonstrated repeatable snow height and internal layering measurements with defined operational guidelines
Background: snowpack monitoring requirements in alpine and avalanche-prone terrain
Accurate snowpack characterization is essential for avalanche forecasting, hydrology, glacier mass-balance studies, and infrastructure safety in cold regions. Traditional ground-based GPR surveys provide high-quality subsurface information but expose operators to hazardous terrain and are limited in spatial coverage.
Recent advances in UAV payload integration and terrain-following flight control have enabled UAV GPR surveys to be conducted a few meters above the snow surface. This approach aims to improve survey safety and spatial coverage while maintaining sufficient resolution for snow height and layering analysis.
The Challenge: Maintaining data quality and repeatability under alpine operating conditions
Snowpack surveys in mountainous environments face both environmental and technical challenges. Snow accumulation and internal layering vary rapidly due to wind redistribution, slope exposure, and temperature gradients. At the same time, steep terrain and avalanche risk limit the feasibility of repeated ground-based measurements.
From a UAV perspective, collecting reliable GPR data requires maintaining a stable antenna height above an uneven snow surface while following predefined flight paths. Variations in UAV attitude, positioning accuracy, and snow surface properties can influence signal incidence angle and repeatability. In addition, wet snow conditions introduce signal attenuation that can reduce penetration depth, particularly at higher radar frequencies.
The study therefore focused on determining whether drone-based GPR surveys could:
- Deliver repeatable snow surface and snow-ground interface measurements
- Operate within safe flight altitudes and speeds in alpine terrain
- Maintain sufficient penetration and resolution under varying snow conditions
The Solution: UAV-borne GPR surveys with controlled flight parameters
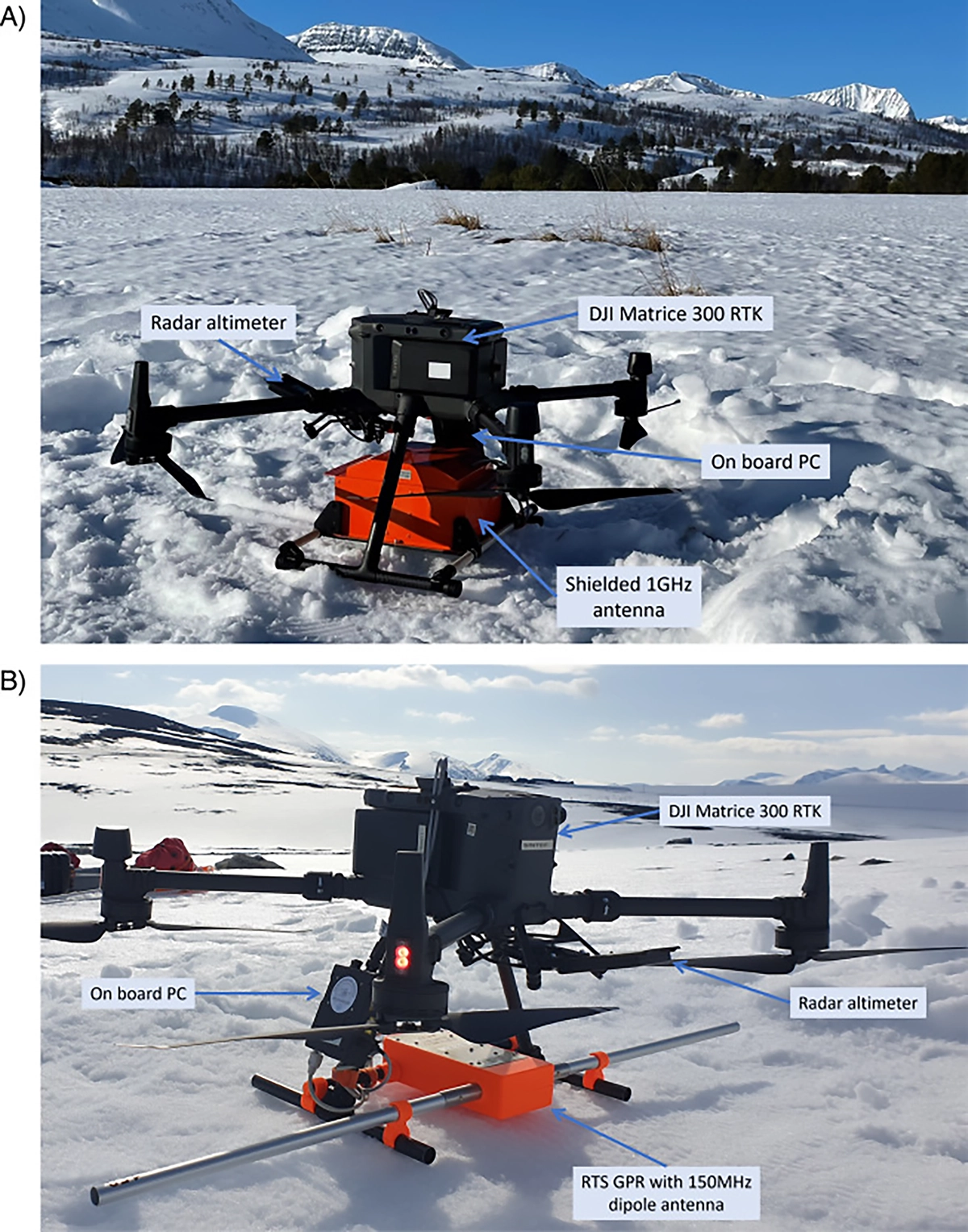
To address these challenges, the research team deployed UAV-borne GPR systems on a DJI Matrice 300 RTK, selected for its payload capacity and stability in mountainous conditions.
Two GPR configurations were utilized to assess resolution and penetration trade-offs:
- A 1 GHz shielded bistatic antenna for high-resolution imaging of shallow snow layers (using Zond Aero 1000 MHz)
- A 400 MHz real-time sampling (RTS) GPR system with dipole antennas for increased penetration in wet snow
Terrain-following capability was enabled using a Nanoradar NRA24 (24 GHz) radar altimeter, integrated with UgCS flight-planning software. Skyhub, an onboard computer, handled sensor integration and data logging. GNSS positioning was used for georeferencing, with RTK available but not consistently applied.
The survey methodology emphasized:
- Predefined flight paths flown parallel to terrain slope
Systematic variation of flight altitude and speed - Repeated surveys along identical paths to assess repeatability
Results: Repeatable snowpack measurements and operational guidelines
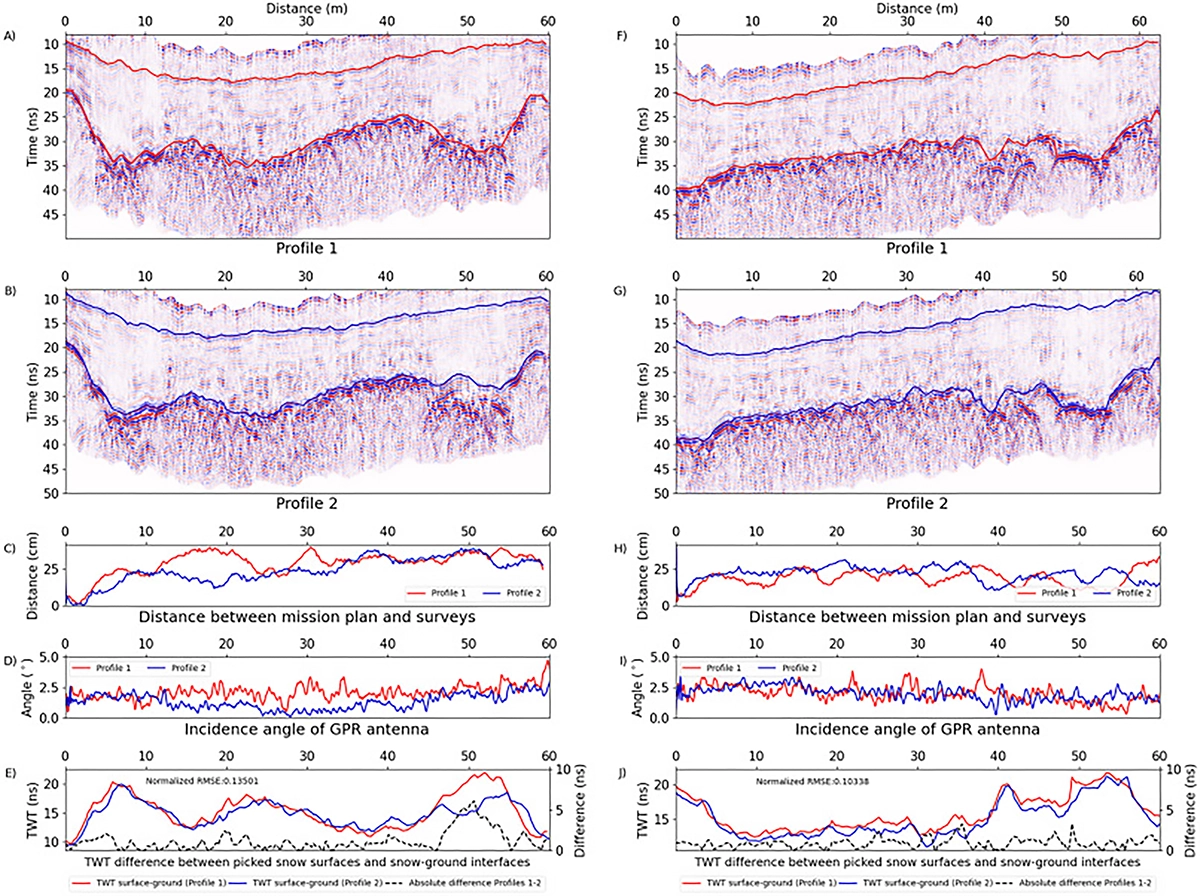
The UAV-borne GPR surveys produced consistent snow surface and snow-ground interface reflections when repeated along identical flight paths. Minor differences between profiles were primarily attributed to UAV positioning uncertainty rather than changes in snowpack structure, supporting the suitability of the method for time-lapse monitoring.
Testing across multiple sites showed that operating at 2-4 m above the snow surface provided a reliable balance between flight safety and data quality. Within this altitude range, internal snow layers remained clearly identifiable. Increasing flight speed up to 2–2.5 m/s did not significantly degrade data quality for layer tracking applications.
Internal snow layers, including centimeter-scale melt-freeze crusts, were detected in dry snow conditions and correlated with nearby snowpit observations. In wet snow, the 1 GHz antenna exhibited reduced penetration depth, while the 400 MHz antenna improved penetration at the expense of vertical resolution.
Conclusion
This case study demonstrates that UAV-borne ground-penetrating radar surveys using a DJI Matrice 300 RTK and multi-frequency GPR systems can provide repeatable snow height and internal layering measurements in alpine environments. When operated within defined flight altitude and speed limits, the method offers a practical and safer alternative to ground-based surveys for snowpack characterization in steep and avalanche-prone terrain.